SCHEDULAZIONE CON ASYNC/AWAIT
Base teorica
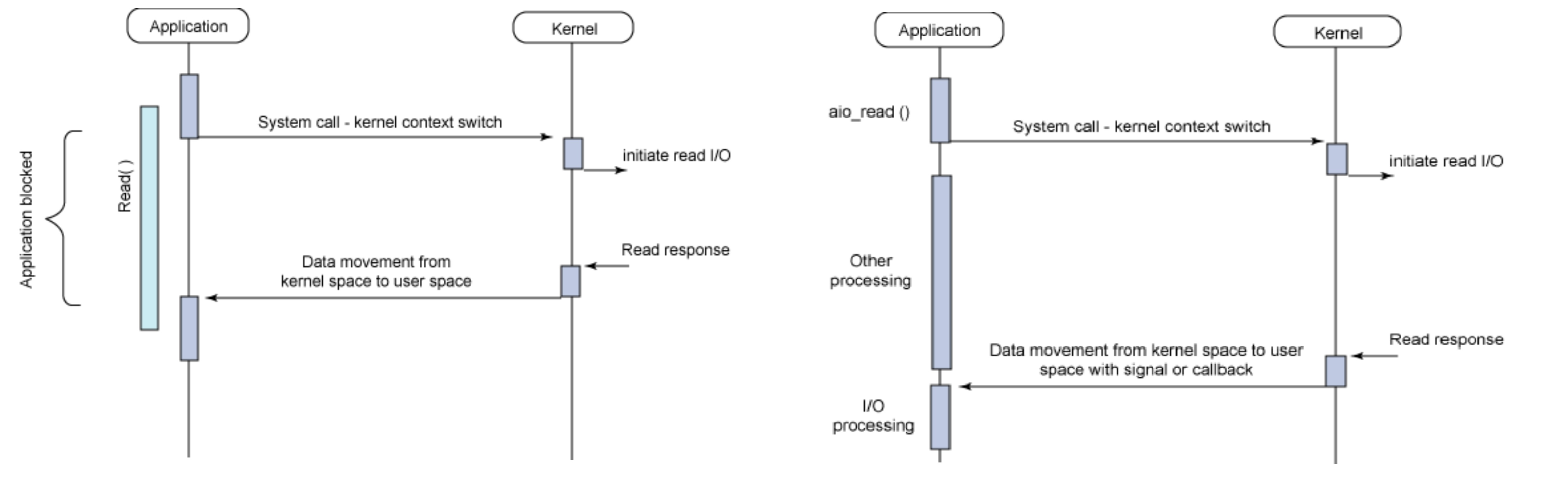
Gestione con I/O sincrono bloccante in figura a sinistra. Gestione con I/O asincrono e non bloccante nella stessa figura ma a destra.
Eventi vs thread
Il modello di gestione della CPU nei SO normalmente è di tipo multithreading preemptive, cioè con interruzione anticipata del task in esecuzione con riassegnazione della risorsa CPU ad un altro task, per almeno due motivi:
- Evitare lo spreco della risorsa CPU in attesa di un input bloccante che tarda la sua risposta di un tempo non prevedibile
- per realizzare un multitasking equo (fair) tramite l’esecuzione concorrente di più task in tempi uguali
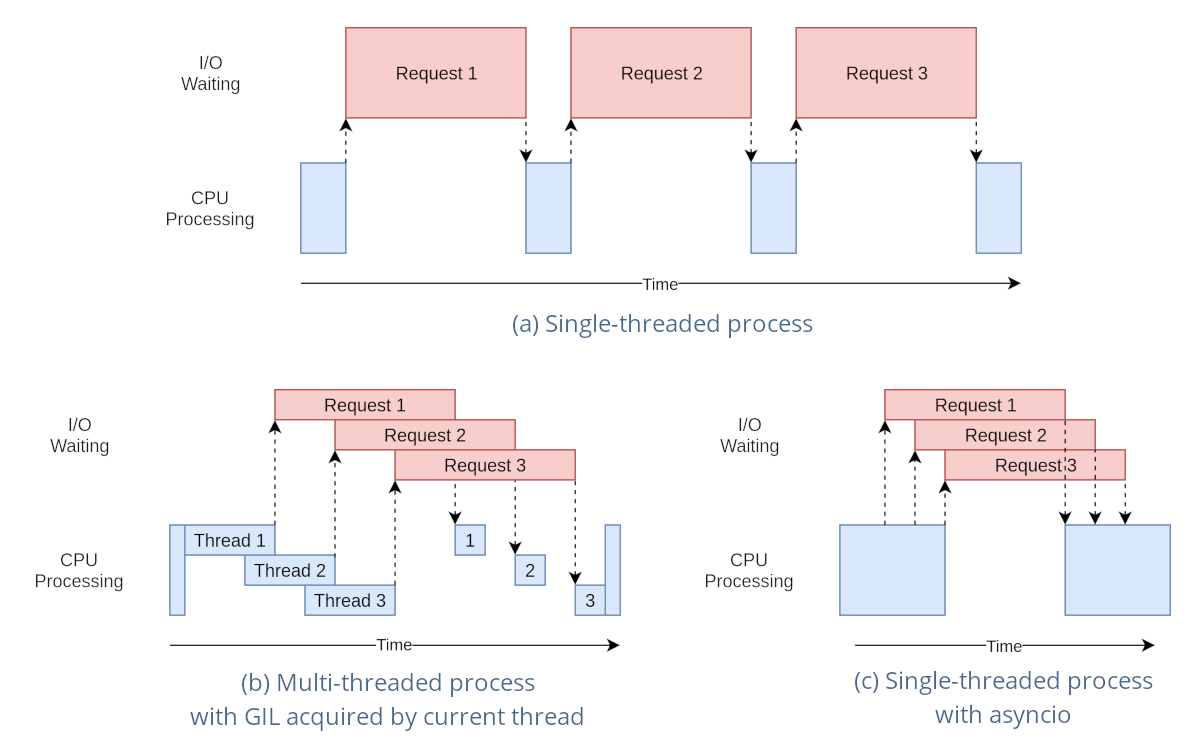
Il modello di gestione della CPU in ambienti server come node JS e client come l’ambiente javascript di un browser web, invece, è normalmente a singolo thread dove il multitasking è generato non utilizzando il multithreading ma un modello di esecuzione ad eventi (event driven runtime) composto da:
- Un singolo thread
- Un singolo task in esecuzione alla volta (esecuzione seriale dei task)
- Più input in elaborazione contemporaneamente (esecuzione parallela degli input)
Callback
Un callback è una funzione che:
- viene passata ad un’altra funzione (via riferimento) con l’aspettativa che venga chiamata al momento opportuno
- Poiché la chiamata di queste funzioni spesso è legata alla notifica di un evento esterno al sistema (I/O dell’utente o l’arrivo di un messaggio da internet) di cui non si è in grado di prevedere in anticipo il tempo in cui accadrà, esse vengono dette asincrone (analogia con gli interrupt).
- Il parametro della chiamata è un messaggio che contiene le proprietà correnti dell’evento
Le callback sono il modo principale in cui vengono implementate in un modello ad eventi le azioni di risposta ad un evento, spesso mediante funzioni definite una sola volta nel codice, tipicamente in forma anonima.
Le callback possono essere:
- Disgiunte (separate) se relative ad eventi slegati tra loro che accadono in maniera indipendente
- Annidate una dentro l’altra se ogni callback è associata ad un evento attivato proprio dentro un’altra callback mediante una richiesta di I/O. Sono particolarmente difficili da approcciare in maniera chiara.
Modello ad eventi
I casi d’uso che potrebbero beneficiare di un modello a thread singolo ad eventi potrebbero essere:
- Concorrenza in un ambiente a thread singolo. Alcuni linguaggi/ambienti di programmazione hanno un solo thread. Un altro esempio è un microcontrollore con risorse limitate che esegue un sistema operativo senza thread. In tutti questi casi, se si ha bisogno di concorrenza, le coroutine sono l’unica scelta.
- Per semplificare il codice. Può essere fatto usando la parola chiave yield, usando async/await per “appiattire”, cioè ridurre ad un unico livello di annidamento il codice asincrono evitando l’inferno delle callback o scrivendo codice asincrono in stile imperativo cioè lineare e sequenziale, molto più naturale da scrivere e mantenere rispetto ad un groviglio disordinato di callback che non seguono un filo temporale preciso.
- Maggiore efficienza e maggiore scalabilità delle risorse del sistema operativo e dell’hardware. In presenza di applicazioni che consumano molti thread, si può trarre vantaggio dalle coroutine risparmiando sull’allocazione della memoria, il tempo necessario per eseguire il cambio di contesto e, in definitiva, trarre vantaggio dall’utilizzo più efficiente dell’hardware che, a parità di risorse, adesso può eseguire più task. Un esempio è l’utilizzo dell’IO non bloccante con molti utenti simultanei. Poiché in generale i thread sono più costosi dei socket, i thread disponibili del sistema operativo si possono esaurire più rapidamente dei socket. Per evitare questo problema è possibile utilizzare l’IO non bloccante con le coroutine.
- riduzione dei rischi connessi all’accesso di risorse condivise tra vari task che, con eventi e coda di messaggi, sono accedute in maniera rigorosamente sequenziale. Inoltre, l’atomicità è realizzata a livello di task piuttosto che di una singola istruzione macchina e potrebbe potenzialmente comprendere una intera transazione (svolgendola per intero senza interferenze grazie al run to completition).
Gli svantaggi sono ascrivibili a:
- una certa complessità rispetto alla getione del multitasking con i thread che, nonostante tutto, rimane al programmatore più trasparente e più semplice.
- una gestione meno accurata dei tempi, la cui schedulazione, come vedremo più avanti (delay zero apparente), risente della pesantezza dei task precedenti a quello correntemente eseguito
- una efficacia ridotta a trattare quelle risorse che si interfaccciano esclusivamente in maniera sincrona e bloccante, per le quali, pur rimanendo sempre possibile la gestione asincrona spostandone l’esecuzione su un altro thread, si riduce significativamente la semplicità che si cercava con questa soluzione. In più, serve di nuovo un SO che gestisca la schedulazione dei thread. Una maniera per aggirare il problema della gestione di più thread, potrebbe essere delegare a servizi in rete le operazioni gravose tramite richieste HTTP.
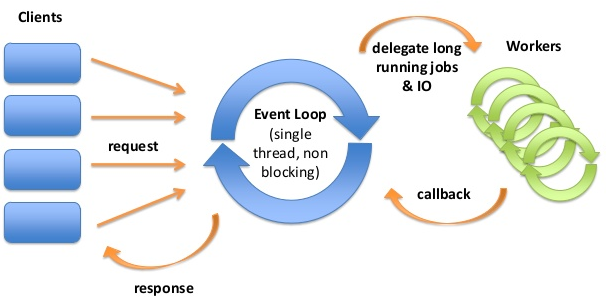
La libreria async.io ha un modello di runtime basato su un ciclo di eventi (event loop), che è responsabile:
- dell’esecuzione del codice
- della raccolta e dell’elaborazione degli eventi
- dell’esecuzione delle dei sotto task (sub-tasks) in coda.
Questo modello è abbastanza diverso dai modelli in altri linguaggi come C e Java basati su processi e thread. Una proprietà molto interessante è che un linguaggio ad eventi, a differenza di molti altri linguaggi, non blocca mai gli altri task quando si è in attesa di un input sul task corrente.
La gestione dell’I/O viene in genere eseguita tramite eventi e callback:
- ad un evento sono associate una o più callback.
- Un evento è un’azione eseguita in qualche I/O.
- Una callback è una funzione che viene richiamata quando viene servito l’evento ad essa associato.
- Gli eventi che occorrono (accadono) contemporaneamente e che sono pronti per essere processati dalla CPU vengono ospitati in una coda di messaggi. In questa attesa il sistema può ancora elaborare altri eventi immagazzinandoli in coda rimanendo così responsivo.
Il primo messaggio in coda viene di volta in volta estratto e processato per essere eseguito inserendo la sua callback, e tutte le funzioni ad essa annidate, in altrettanti frame sullo stack. La callback correntemente sullo stack, viene eseguita fino a che non ritornano tutte le sottofunzioni ad essa annidate.
Se le operazioni da svolgere nei task sono CPU intensive è buona norma delegarle a fornitori di servizi esterni al thread corrente, questi possono essere servizi in rete oppure servizi in esecuzione su altri thread. Una volta completata l’operazione delegata (può trascorrere un certo tempo), viene richiamata una callback (sul thread del loop degli eventi) con cui si notificano i risultati dell’operazione.
Purtroppo, la libreria standard C++ di Arduino non supporta, per il momento, direttamente il costrutto async/await. Tuttavia, possiamo simulare un comportamento simile utilizzando la libreria di macro async.h , che fornisce un’implementazione della programmazione concorrente su Arduino basata sui Duff’s device su cui si basano i protothread.
Caratteristiche:
- È C. puro e portatile al 100%.
- Richiede pochissimo stato (2 byte).
- Non dipende da un sistema operativo.
- È un po’ più semplice da comprendere rispetto ai protothread perché lo stato asincrono viene salvato dal chiamante anziché dal chiamato.
Funzioni:
- async_begin(state) Segna l’inizio di una subroutine asincrona
- async_end Segna la fine di una subroutine asincrona
- async_yield Restituisce l’esecuzione finché non viene richiamato nuovamente
- wait(cond) Blocca l’avanzamento finché la cond non diventa vera
- await_while(cond) Blocca l’avanzamento mentre cond è vera
- async_exit Termina la subroutine asincrona corrente
- async_call(func, state) Chiama in modo asincrono func(state) e restituisce true se l’esecuzione è terminata (opzionale). Puoi anche semplicemente chiamare direttamente func(state) che restituisce true/false.
- async_init(state) Inizializza lo stato della subroutine asincrona
- async_done(state) Restituisce vero se la subroutine asincrona ha completato l’esecuzione, altrimenti falso
- await_delay(x) Attesa non bloccante per un certo numero x di millisecondi
Precauzioni:
- Come con i protothread, bisogna fare attenzione alle istruzioni switch all’interno di una subroutine asincrona. Attenendosi a questa semplice regola non si avranno mai problemi: posizionare ogni istruzione switch all’interno di una sua funzione. Questa, in genere, è comunque una buona pratica.
- Come con i protothread, non è possibile effettuare chiamate di sistema bloccanti e preservare la semantica asincrona. Queste devono essere trasformate in chiamate non bloccanti che testano una condizione.
Tratto da https://github.com/naasking/async.h
Definizione delle macro async/await
Nelle situazioni in cui non è possibile includere librerie come accade nel simulatore Tinkercad, allora si può inserire in cima al file la definizione delle macro che definiscono i costrutti async/await:
typedef enum ASYNC_EVT { ASYNC_INIT = 0, ASYNC_CONT = ASYNC_INIT, ASYNC_DONE = 1 } async;
#define async_state unsigned _async_k
struct as_state { async_state; };
#define async_begin(k) unsigned *_async_k = &(k)->_async_k; switch(*_async_k) { default:
#define async_end *_async_k=ASYNC_DONE; case ASYNC_DONE: return ASYNC_DONE; }
#define await(cond) await_while(!(cond))
#define await_while(cond) *_async_k = __LINE__; case __LINE__: if (cond) return ASYNC_CONT
#define async_yield *_async_k = __LINE__; return ASYNC_CONT; case __LINE__:
#define async_exit *_async_k = ASYNC_DONE; return ASYNC_DONE
#define async_init(state) (state)->_async_k=ASYNC_INIT
#define async_done(state) (state)->_async_k==ASYNC_DONE
#define async_call(f, state) (async_done(state) || (f)(state))
#define await_delay(delay) \
{ \
do { \
static unsigned long as_sleep; \
as_sleep = millis(); \
await(millis() - as_sleep > delay); \
} while(false); \
}
Esempi
Blink sequenziali interagenti
Di seguito è riportato un esempio di blink sequenziale in esecuzione su due task separati su scheda ESP32, con IDE Wokwi e con la libreria uasync.io. La programmazione sequenziale del blink del led è emulata tramite una funzione delay() non bloccante await_delay() fornita dalla libreria async.h.
#include "async.h"
bool blink1_running = true;
int led1 = 13;
int led2 = 12;
byte pulsante=2;
as_state pt1, pt2;
async asyncTask1(as_state *pt) {
async_begin(pt);
// Loop secondario protothread
while(true) {
digitalWrite(led1, HIGH); // turn the LED on (HIGH is the voltage level)
await_delay(500); // delay non bloccanti
digitalWrite(led1, LOW); // turn the LED off by making the voltage LOW
await_delay(500); // delay non bloccanti
}
async_end;
}
async asyncTask2(as_state *pt) {
async_begin(pt);
// Loop secondario protothread
while(true) {
digitalWrite(led2, HIGH); // turn the LED on (HIGH is the voltage level)
await_delay(1000); // delay non bloccanti
digitalWrite(led2, LOW); // turn the LED off by making the voltage LOW
await_delay(1000); // delay non bloccanti
}
async_end;
}
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
/* Initialize the async state variables with async_init(). */
async_init(&pt1);
async_init(&pt2);
}
void loop() { // loop principale
asyncTask1(&pt1);
asyncTask2(&pt2);
delay(10);
}
Link simulazione online: https://wokwi.com/projects/393802635182647297
Pulsante toggle + blink
In questo caso, il rilevatore dei fronti è realizzato campionando il valore del livello al loop di CPU attuale e confrontandolo con il valore del livello campionato nello stesso loop ma in un momento diverso stabilito mediante un istruzione waitUntilInputLow(). La funzione, di fatto, esegue un blocco del task corrente in “attesa” della soddisfazione di una certa condizione, senza bloccare l’esecuzione degli altri task. L’attesa è spesa campionando continuamente un ingresso fino a che questo non diventa LOW. Quando ciò accade allora vuol dire che si è rilevato un fronte di discesa per cui, qualora in futuro, in un loop successivo, si determinasse sullo stesso ingresso un valore HIGH, allora si può essere certi di essere in presenza di un fronte di salita.
Pulsante toggle che realizza blink e antirimbalzo realizzato con una schedulazione sequenziale con i ritardi emulati all’interno di task diversi su uno stesso thread. La libreria usata è async.h:
#Alla pressione del pulsante si attiva o disattiva il lampeggo di un led
#include "async.h"
bool blink1_running = true;
int led1 = 13;
int led2 = 12;
byte pulsante=2;
bool stato;
as_state pt1, pt2, pt3;
async asyncTask3(as_state *pt) {
async_begin(pt);
// Loop secondario protothread
while(true) {
if(digitalRead(pulsante)==HIGH){ // se è alto c'è stato un fronte di salita
stato = !(stato); // impostazione dello stato del toggle
await_delay(50);
await(digitalRead(pulsante)==LOW); // attendi fino al prossimo fronte di discesa
}else{
async_yield;
}
}
async_end;
}
async asyncTask1(as_state *pt) {
async_begin(pt);
// Loop secondario protothread
while(true) {
if(stato){
digitalWrite(led1, HIGH); // turn the LED on (HIGH is the voltage level)
await_delay(500); // delay non bloccanti
digitalWrite(led1, LOW); // turn the LED off by making the voltage LOW
await_delay(500); // delay non bloccanti
}else{
digitalWrite(led1, LOW);
async_yield;
}
}
async_end;
}
async asyncTask2(as_state *pt) {
async_begin(pt);
// Loop secondario protothread
while(true) {
digitalWrite(led2, HIGH); // turn the LED on (HIGH is the voltage level)
await_delay(1000); // delay non bloccanti
digitalWrite(led2, LOW); // turn the LED off by making the voltage LOW
await_delay(1000); // delay non bloccanti
}
async_end;
}
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
/* Initialize the async state variables with async_init(). */
async_init(&pt1);
async_init(&pt2);
async_init(&pt3);
stato = false;
}
void loop() { // loop principale
asyncTask1(&pt1);
asyncTask2(&pt2);
asyncTask3(&pt3);
delay(10);
}
Link simulazione online: https://wokwi.com/projects/393860825891092481
Osservazioni:
Quando si tratta di sistemi embedded, il modello cooperativo presenta due vantaggi.
- Innanzitutto, è leggero. È possibile avere un numero elevato di attività perché, a differenza dei thread annullati, le attività in pausa contengono poco stato.
- In secondo luogo evita alcuni degli insidiosi problemi associati alla programmazione con prerilascio forzato delle risorse. In pratica, il multitasking cooperativo è ampiamente utilizzato, in particolare nelle applicazioni che gestiscono interfacce utente.
- d’altronde, se si realizzano task molto pesanti, cioè di tipo CPU intensive quale il seguente:
for x in range(1000000): # fai qualcosa che perde molto tempoaccade che gli altri task rimangono bloccati in attesa del completamento di questo.
Sitografia:
- https://docs.micropython.org/en/v1.15/library/uasyncio.html
- https://github.com/peterhinch/micropython-async/blob/master/v3/docs/TUTORIAL.md
- https://medium.com/martinomburajr/rxjava2-schedulers-2-breaking-down-the-i-o-scheduler-7e83160df2ed
- https://hackaday.com/2019/09/24/asynchronous-routines-for-c/#more-377555
- https://github.com/naasking/async.h