CONSIDERAZIONI GENERALI SUI PROBLEMI
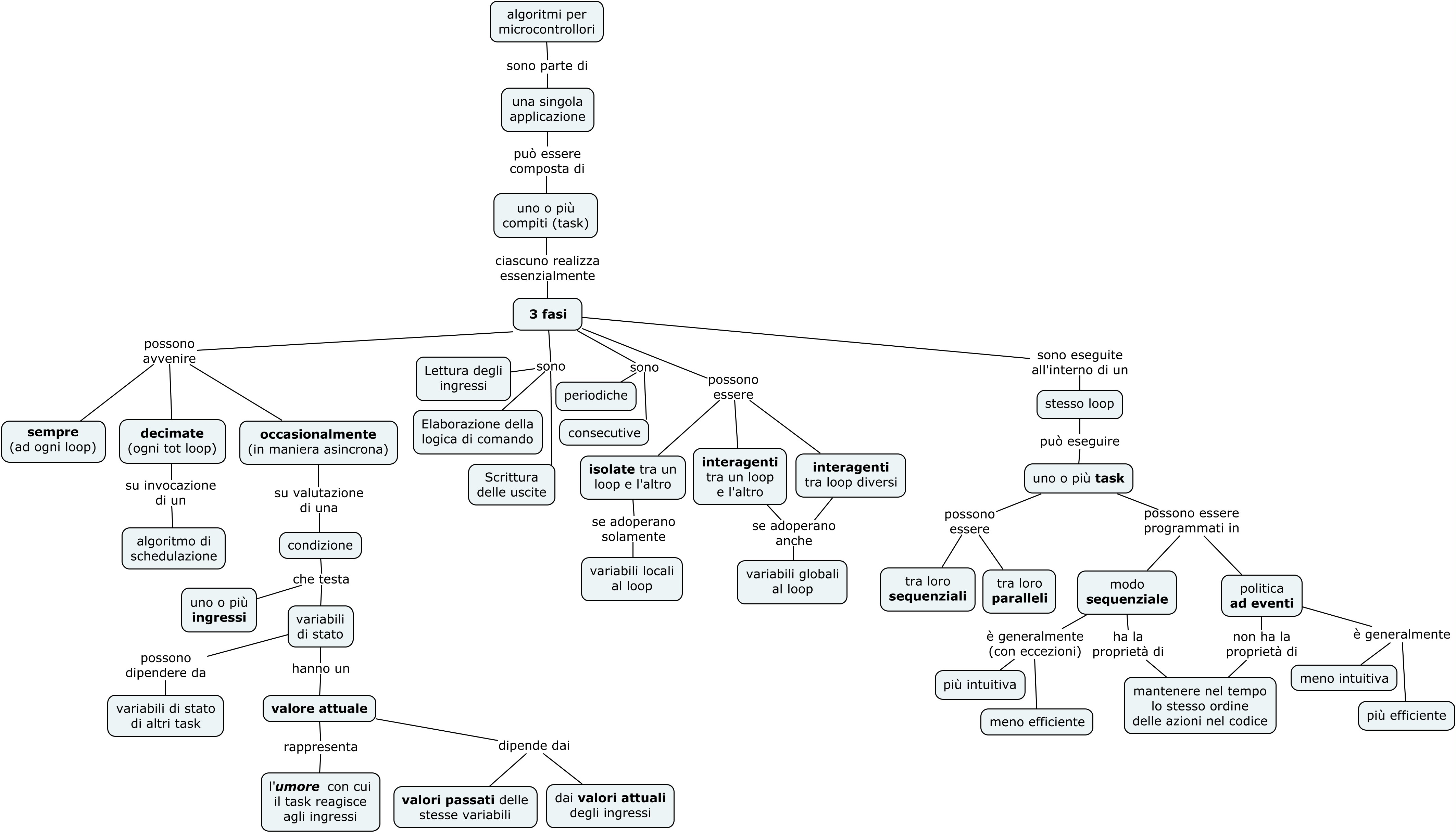
La logica degli algoritmi può essere pensata essenzialmente in due maniere: ad eventi e in modo sequenziale.
Nei microcontrollori il tempo è un elemento portante della maggiorparte degli algoritmi. Il modo sequenziale di pensare il tempo in un algoritmo è sicuramente quello più intuitivo ed ha una sua naturale corrispondenza con le istruzioni di un programma.
Infatti, in un listato sorgente, le istruzioni che spazialmente vengono dopo, sono eseguite dopo anche temporalmente (se non ci sono stati salti). Quantificare il dopo nel tempo tra una istruzione e l’altra è proprio il compito assegnato all’istruzione delay(x), che non fa altro che bloccare l’esecuzione del loop principale (come di un qualsiasi loop secondario basato sui thread) per x millisecondi.
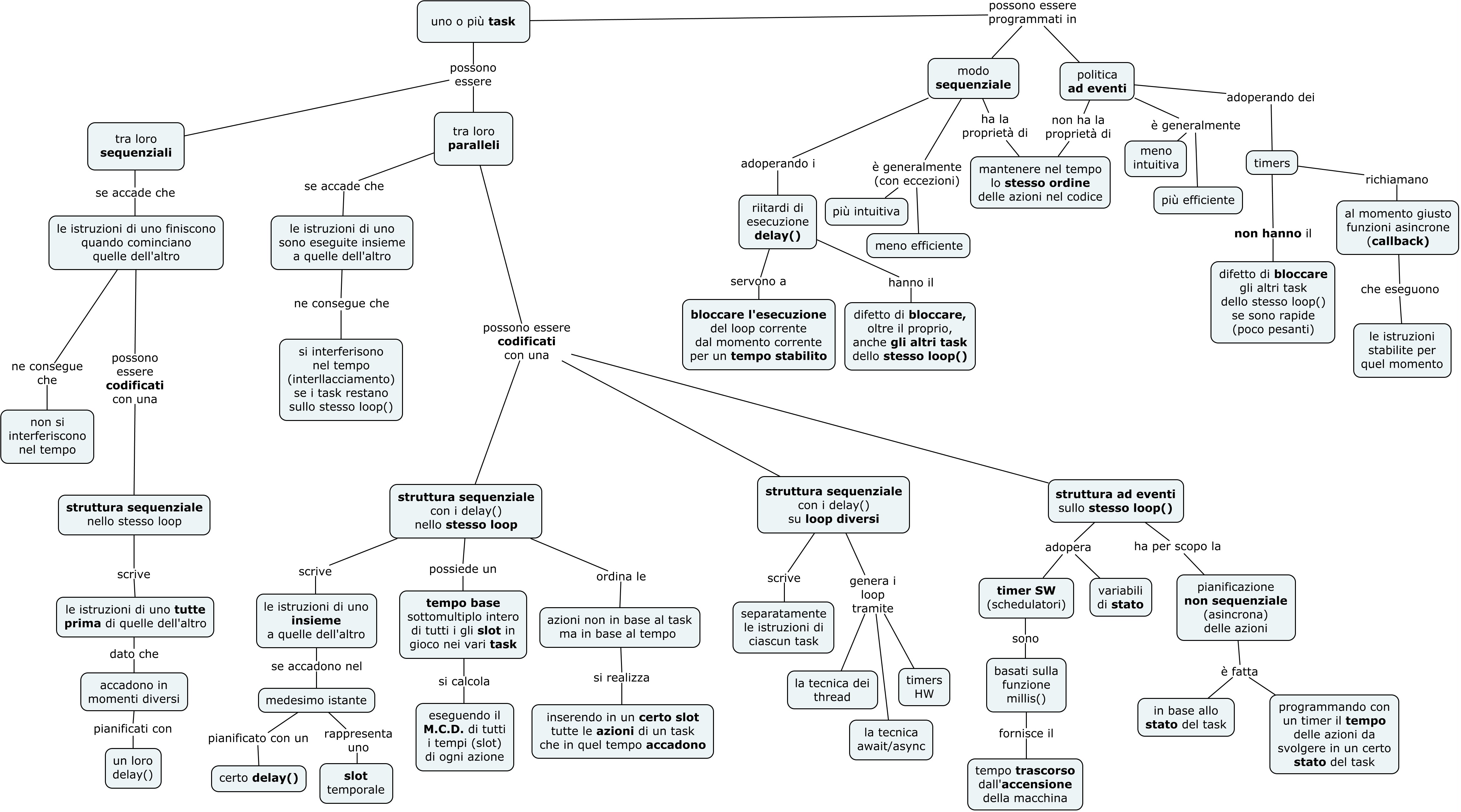
Finchè un programma consiste in un unico task avente un flusso temporale unico va tutto bene. Il modello lineare di programmazione è chiaro, intuitivo ed adeguato. Quando però, in un algoritmo coesistono più task separati, ciascuno composto da un proprio filo temporale che si interseca con quello degli altri, allora, il problema di codificarlo in un programma si complica. In questo caso, è quindi dirimente sapere se i task di cui si compone l’algoritmo sono sequenziali o procedono in maniera parallela, e se si, stabilire se, quando si incrociano, un task deve aspettarne qualcun altro prima di proseguire.
In linea di principio, se i task sono sequenziali nulla osta a metterli tutti nello stesso loop principale eseguendoli uno di seguito all’altro, dato che il loro sviluppo fisico nel codice è anche il loro sviluppo temporale.
Se, invece, più task sono paralleli, allora sviluppare la loro codifica in un unico flusso di esecuzione necessita il coordinamento dei ritardi di tutti. Per ottenere ciò una strategia potrebbe essere stabilire il massimo comune divisore dei tempi che compaiono nei delay(). Se questo MCD esiste, diventa il tempo base di tutti i task, cioè quello mediante il quale è possibile programmare i tempi dei vari task incastrandoli l’uno nell’altro.
Ad esempio, posso far accadere ogni 2 tempi base il blink di un led rosso e ogni 3 quello di un led verde semplicemente dividendo il tempo in slot tramite un delay che vale esattamente un tempo base e scrivendo, per ogni slot, l’istruzione che compete ad ogni task. Se un task in uno slot non fa nulla allora li non compare alcuna sua istruzione (vedi Es2).
Quando, però, i task concorrenti diventano tanti od oppure sono complicati allora potrebbe risultare tedioso progettarli e realizzarli tutti insieme interlacciandoli nel tempo. Un algoritmo siffatto può essere ancora più difficile da realizzare se accade che uno o più task non sono proprio del tutto indipendenti, ma si aspettano l’uno con l’altro in certi istanti.
In questo caso le opzioni sono: o cambiare radicalmente approccio adoperando uno stile di programmazione ad eventi, perdendo il benefit della intuitività della programmazione sequenziale, oppure mantenere lo stile lineare e sequenziale del programma rendendo i task indipendenti, non solo concettualmente ma anche nel loro flusso di esecuzione.
Se scegliamo la seconda opzione, task indipendenti vengono mandati in esecuzione su loop indipendenti che procedono separatamente ma contemporaneamente, in parallelo l’uno con l’altro. I flussi di esecuzione paralleli ed indipendenti vengono chiamati thread o processi, a seconda dei casi. Noi useremo solamente i thread. Per una trattazione più completa della teoria dei thread e di come questi possono essere adoperati nel codice vedi thread.
Questo risultato è possibile ottenerlo se il microcontrollore ha la capacità di eseguire più flussi paralleli di codice e ciò è sempre possibile se a bordo è installato un sistema operativo. Il microcontrollore ESP32 ha un su SO mentre Arduino no, per cui si possono usare le API dei thread nel codice di un programma solo su ESP32 e non su Arduino.
In definitiva, non adoperando, per adesso, tecniche di programmazione ad eventi dobbiamo limitarci a quelle sequenziali che hanno comunque il pregio di essere intrinsecamente più intuitive rispetto a quelle ad eventi per una larga categoria di problemi. Le linee guida per mantenere uno stile di programmazione lineare potrebbero essere:
- se i task procedono in maniera sequenziale, cioè, uno dopo l’altro, allora si possono pianificare indipendentemente mettendoli fisicamente uno di seguito all’altro all’interno di uno stesso loop.
- se i task procedono in maniera parallela e indipendente allora si possono pianificare in modo indipendente soltanto se si mandano in esecuzione su thread separati, all’interno di un loop() dedicato, assegnato solamente a loro.
- se i task procedono in maniera parallela ma non del tutto indipendente, perchè capita che uno rimane in attesa del risultato dell’altro prima di andare avanti, allora bisogna trovare il modo di sincronizzarli con delle istruzioni di attesa, non fisse come le
delay(), ma dinamiche e legate all’accadere di un certo evento. Un evento è sempre segnalato dalla verità di una certa condizione, valutabile da una istruzione comewaitUntil(c), dovecè la condizione.
TIMER UR
E’ possibile realizzare dei timers, con cui programmare nel futuro lo stesso evento o una sequenza di eventi diversi, senza attese, cioè senza delay(), eseguendo un polling del tempo di conteggio di un timer.
Un polling è l’interrogazione periodica di una variabile o di un ingresso per leggerne il valore. Se il valore è maggiore di un tempo massimo allora si considera avvenuto un timeout e si esegue il blocco di codice associato ad esso.
Il polling serve per verificare, ad ogni loop(), che il tempo trascorso (elapsed) abbia raggiunto il valore finale (timeout) stabilito come obiettivo (target). Ciò si può ottenere eseguendo il test periodico di una condizione su una funzione di misura del tempo, nello specifico una get(), che, ad ogni loop(), restituisce il tempo di conteggio. Se la condizione di uscita dal conteggio è vera allora il blocco di istruzioni associato al timeout del timer viene eseguito.
Un timeout si controlla, valutando la condizione di scadenza del timer sulla funzione get() mediante una istruzione di selezione if. Ad esempio, eseguendo periodicamente (polling) nel loop() il controllo if(t.get() > 10000) {....}, si può stabilire se, dal momento dell’attivazione del timer, sono pasasti 10 secondi e, in caso affermativo, eseguire le istruzioni nel blocco then che nel codice segue la condizione di scadenza.
La funzione get() non è bloccante (non causa alcun ritardo) e non interferisce con nessun delay del loop corrente, sia esso il loop principale o quello secondario di un thread. Essa rappresenta, quindi, un task che si può tranquillamente adoperare in sequenza ad altri task di uno stesso loop, anche se questi contengono dei ritardi delay().
Il polling della funzione get() può essere effettuato in qualunque punto del loop, anche più volte se necessario, in genere si esegue per:
- se il timer è attivo, controllare una scadenza, cioè vedere se è passato il tempo necessario per compiere una certa azione (modificare una variabile o chiamare una funzione)
- se il timer non è attivo, impostare una cadenza, cioè se il timer è stato bloccato su un certo tempo con uno
stop(), utilizzare quel valore programmato di tempo per impostare dinamicamente un ritardo delay, oppure per confrontarlo con altri tempi che si stanno accumulando su una variabile all’interno del loop.
Si tratta di un pattern (tipo di API) per la realizzazione di timers molto comune nella programmazione di bracci robotici per uso industriale (vedi bracci Universal Robots) che si adatta bene ad essere impiegato sia in un contesto in cui la logica dell’algoritmo è realizzata in maniera sequenziale sia in quello in cui gli input sono gestiti con un modello ad eventi.
In generale, possiamo individuare alcune componenti del timer:
- reset del timer. Accade al verificarsi di una certa condizione. Determina sia l’azzeramento del tempo di conteggio che l’azzeramento della misura del ritardo dall’ultimo riavvio. L’azzeramento non è mai automatico ed è necessario impostarlo prima del riutilizzo del timer dopo uno o più comandi
stop()(tipicamente al momento della valutazione della condizione di timeout) altrimenti è sufficiente richiamare la funzionestart(). - start. Avvia o riavvia il timer quando si avvera la condizione di attivazione posta in punto qualsiasi del loop. Imposta il flag di stato
timerState. - stop del timer. Accade al verificarsi di una certa condizione di sospensione del timer posta in punto qualsiasi del loop. In questa occasione il timer campiona il ritardo accumulato dall’ultimo riavvio e lo somma al tempo di conteggio cumulato in corrispondenza della sospensione precedente. In questo modo il tempo trascorso è memorizzato e può essere valutato in un momento successivo nel codice tramite la funzione
get(). - get del tempo tempo di conteggio (elapsed) dal momento del primo avvio del timer. E’ una funzione non bloccante, cioè non genera attese dato che restituisce immediatamente il suo risultato. Viene interrogata periodicamente (polling) ad ogni ciclo di loop (meno se decimato ogni tot loop) e serve a realizzare una espressione di confronto con un tempo di timeout (
var.get() > timeout). Il valore restituito dipende dallo stato del timer:- se
timerState == falseallora restituisce l’ultimo tempo di conteggio misurato e memorizzato al momento della chiamata a stop() . - se
timerState == trueallora calcola il tempo di conteggio corrente campionando il ritardo attuale dall’ultimo riavvio e sommandolo ai ritardo cumulato prima dell’ultima sospensione.
- se
- istruzioni triggerate (scatenate) dal timer. Vengono eseguite in base al tempo di conteggio misurato dal timer. Vengono eseguite in maniera sequenziale in un punto stabilito del loop (istruzioni sincrone) in corrispondenza della verità di una certa condizione sul tempo di conteggio che coinvolge la funzione
get()come operando. In corrispondenza si dovrebbero eseguire:- reset() per azzerare il timer.
- stop() per bloccare il timer.
Per consultare dettagli sulla sua implementazione vedi timer sequenziali.
SCHEDULAZIONE CON I TIMERS HW
La schedulazione dei task normalmente riguarda quei compiti che devono essere ripetuti in maniera periodica, infatti si parla di loop() principale e di loop secondari eventualmente sullo stesso thread (protothread o mediante costrutti async/await) o su altri thread. Lo stesso risultato può essere ottenuto con dei timer HW che realizzano un loop su base evento. L’evento è l’interrupt di un timer HW, il loop è rappresentato dalla calback associata al timer e che viene viene da esso periodicamente richiamata.
Ma un timer si può impostare per generare:
- eventi sincroni cioè periodici dopo intervalli fissi e programmabili
- eventi asincroni cioè aperiodici da eseguire una sola volta (monostabili o one-shot) dopo un certo tempo calcolato nel futuro a partire dal momento in cui avviene il comando di attivazione (start).
Per cui un timer HW offre una versatilità in più se, nello stesso progetto, si vogliono combinare insieme eventi periodici con eventi aperiodici triggerati da eventi su un ingresso o da altri eventi (scadenza di timeout o contatori).
La stessa cosa è in realtà possibile realizzarla anche con i timer SW basati sul polling nel loop principale della funzione millis(). La loro versatilità è uguale se non superiore, ma sono soggetti ad alcune limitazioni che potrebbero renderli non adatti in certi contesti. L’ambito che penalizza di più i timer SW è quello delle applicazioni mission-critical (o critical-time). In questo tipo di applicazioni si deve prevedere che l’esecuzione di certi compiti avvenga in maniera estremamente puntuale, pena l’introduzione di instabilità nel sistema o di perdita di sicurezza per chi lo adopera.
Rispetto agli altri metodi di creazione di base dei tempi (polling della millis(), thread e protothread), è tendenzialmente più legato ad uno specifico vendor di HW e ad una specifica linea di prodotti. Le API dei timer, pur esendo molto simili tra loro, non sono standardizzate e la portabilità del SW nel tempo potrebbe non essere garantita. In ogni caso semplificano parecchio la gestione delle ISR associate a timer HW che altrimenti, eseguita a basso livello, richiede una impostazione di registri interni della CPU che necessita di conoscenze di dettaglio molto specifiche.
### Modalità di utilizzo
La modalità di utilizzo è simile a quella di una usuale ISR. Una funzione di callback viene associata ad un evento di un timer tramite un metodo attach(). La dissociazione si fa con il metodo contrario detach(). Gli eventi possibili sono una chiamata una tantum (one shot o timer monostabile) o una chiamata periodica o timer bistabile. Nella definizione dell’attach() viene anche impostato il tempo di scadenza del timer. Gli eventi possibili sono:
- una chiamata una tantum (one shot o timer monostabile)
- una chiamata periodica o timer bistabile.
I timer HW possono essere:
- fisici. Cioè limitati in numero ai dispositivi HW dedicati a questo scopo effettivamente presenti nel sistema (nell’ESP32 sono 4) e inoltre devono essere riferiti esplicitamente nel codice con un loro specifico id (un numero da 1 a 4).
- logici o virtuali. Sono virtualmente di numero infinito e rappresentano delle astrazioni SW del sottostante HW fisico che è condiviso in qualche modo da uno strato di gestione trasparente al programmatore.
La possibilità di poter instanziare un timer logico per ogni task, a sua volta definito all’interno di una certa callback, rende l’utilizzo dei timer una strada effettivamente percorribile per la realizzazione di uno schedulatore di compiti sia periodici che one shot (esecuzione singola non ripetuta). La schedulazione dei compiti inoltre rimane molto precisa perchè collegata a ISR eseguite da segnali di interrupt lanciati da timer fisici.
Si ricorda che in C e in C++ le variabili globali a comune tra ISR e loop() principale e suscettibili di modifiche da parte di entrambi andrebbero dichiarate tutte con il qualificatore volatile.
Limitazioni nell’utilizzo
I timer richiamano particolari funzioni di callback , le ISR, che sono attivate a seguito di un interrupt HW (timeout del timer). Nei sistemi multi-core questi interrupt possono essere chiamati solo dal core che ha eseguito il timer. Ciò significa che se si utilizza un timer per attivare un interrupt, è necessario assicurarsi che l’interrupt venga chiamato solo dal core che sta eseguendo il timer.
le ISR di base non sono interrompibili a meno di impostare apposite istruzioni che lo consentono. Interrompere una ISR potrebbe causare inconsistenze nella gestione delle risorse condivise con il loop o altri thread. D’altra parte, una ISR che non si interrompe per molto tempo impedisce la tempestiva esecuzione delle altre ISR dovute ad interruzioni simultanee o temporalmente vicine.
Esistono limitazioni speciali su ciò che può e non può essere fatto all’interno delle ISR nella maggior parte dei controllori:
- Ad esempio, non è consentito allocare memoria dinamica all’interno di una ISR.
- una ISR che esegue una logica complessa potrebbe essere eseguita così lentamente da creare instabilità del sistema dovuta al fatto che altre interruzioni, che gestiscono servizi essenziali del sistema, non sono state prontamente soddisfatte. Un gestore di interrupt dovrebbe essere sempre una funzione breve che esegue il lavoro minimo necessario per modificare delle variabili esterne.
- In genere, in molte implementazioni, callback diverse di uno stesso timer vengono eseguite in sequenza e non su thread paralleli per cui operazioni bloccanti come le
delay(), oltre a causare possibili instabilità (sono ISR basate su interrupt), ritardano l’esecuzione delle callback a seguire. - eseguire task complessi con un timer HW è possibile a patto che questi vengano resi interrompibili senza creare problemi, e ciò si può ottenere eseguendoli in un altro thread o nel loop principale. Nel loop principale, un task complesso può sempre essere immediatamente attivato da una ISR che asserisce un opportuno flag di avvio.
- nel multitasking con i timer logici, il parallelismo degli eventi è garantito mentre il parallelismo percepito dei task è tanto maggiore quanto più questi sono veloci (dato che in realtà questi sono memorizzati in una coda da dove vengono estratti e mandati in esecuzione uno ad uno in sequenza). Nel multitasking con i timer il task di una callback viene eseguito solamente dopo il completamento di una eventuale callback attualmente in coda.
- nel multitasking con i thread, sia il parallelismo degli eventi che quello dei task è completo perchè nella coda di esecuzione stavolta in sequenza non vengono eseguiti interi task ma, a turno, gruppi di istruzioni macchina di ciascun task (meccanismo dell’interleaving). Nel multitasking con i thread il task di un thread viene eseguito solamente dopo il completamento del quanto di tempo assegnato al task attualmente presente nella coda dei thread in esecuzione.
- nel multitasking con l’interrupt sugli ingressi, sia il parallelismo degli eventi che quello dei task è completo perchè la coda di esecuzione stavolta viene bloccata (mettendo thread e processi in wait) lasciando giusto il tempo di completare l’istruzione macchina corrente. Nel multitasking con gli interrupt a basso livello il task di una ISR viene eseguito immediatamente dopo il completamento dell’istruzione macchina del task attualmente presente nella coda dei thread in esecuzione.
Timers SW vs Timer HW
Se con la funzione get() di un timer SW si desiderasse controllare una scadenza, cioè vedere se è passato il tempo necessario per compiere una certa azione (modificare una variabile o chiamare una funzione), allora si dovrebbero soddisfare due esigenze:
- verificare la verità della condizione
get() > timeouted eseguire, eventualmente, l’azione prevista al timeout (scadenza) del timer. - eseguire la valutazione al punto precedente periodicamente, finchè essa non accade.
I due requisiti precedenti si traducono nell’azione di eseguire il polling della funzione get() nel loop(), alla massima velocità o, più lentamente, ogni tot millisecondi. Nella vita reale, si può assimilare ad un polling l’osservazione periodica di un orologio a muro effettuata con lo scopo di individuare il momento esatto in cui deve essere eseguita una certa azione come, ad esempio, l’estrazione dal forno di un ciambella.
Se si volesse fare la stessa cosa con un timer HW allora ci si renderebbe conto che il polling non è più necessario perchè, al timeout, attraverso, un segnale proveniente dal timer HW, viene attivato l’ISR associata a quel segnale che, a sua volta, comanda l’esecuzione di una callback definita al suo interno. Per rimanere alla metafora precedente, adesso non è più necessario osservare periodicamente l’orologio alla parete, perchè un timer, impostato ad inizio cottura, avviserà con un segnale acustico il pasticciere quando il momento di togliere il dolce dal forno sarà arrivato .
Si noti che, sia per timer HW che per timers SW, l’ordine di apparizione dei task all’interno del codice del loop potrebbe non rispecchiare l’ordine con cui gli stessi vengono eseguiti, cioè l’ordine di esecuzione avviene in maniera asincrona rispetto al codice, secondo il principio della cosidetta programmazione ad eventi. Eventi possono attivare o disattivare altri eventi in base ad input esterni oppure in base al valore raggiunto da certe variabili di stato.
Toggle basato sul polling del tempo corrente get()
In questo caso, il rilevatore dei fronti è realizzato campionando il valore del livello al loop di CPU attuale e confrontandolo con il valore del livello campionato al loop precedente (o a uno dei loop precedenti). Se il valore attuale è HIGH e quello precedente è LOW si è rilevato un fronte di salita, mentre se il valore attuale è LOW e quello precedente è HIGH si è rilevato un fronte di discesa.
Toggle con antirimbalzo esterno
/*Alla pressione del pulsante si attiva o disattiva il lampeggo di un led*/
#include "urutils.h"
int led = 13;
byte pulsante = 12;
byte stato = LOW; // variabile globale che memorizza lo stato del pulsante
DiffTimer t1;
DiffTimer debt;
// oggetto pulsante senza debouncing
typedef struct
{
byte state = LOW;
byte val0 = LOW;
bool toggle(byte val) {// toggle con debouncing
if ((val == HIGH) && (val0 == LOW)){// rilevazione fronte di salita
state = !state; // logica toggle
}
val0 = val; // aggiornamento livello precedente al livello attuale
return val; // ritorna il valore attuale del pulsante
}
} ToggleBtn;
ToggleBtn bt1;// pulsante senza antirimbalzo incorporato
void blink(byte led){
digitalWrite(led, !digitalRead(led));
}
void setup() {
Serial.begin(115200);
pinMode(led, OUTPUT);
pinMode(pulsante, INPUT);
t1.start();// attivazione blink
debt.start();// attivazione debouncer
}
// loop principale
void loop() {
if(debt.get() > 50){// polling timer debouncer
debt.reset();
bt1.toggle(digitalRead(pulsante));// polling pulsante
}
if(t1.get() > 500){// polling timer blink
t1.reset(); // riarmo timer blink
if(bt1.state){// polling stato del toggle
blink(led);
}else{
digitalWrite(led, LOW);
}
}
delay(10);
}
Simulazione online su Esp32 con Wowki del codice precedente: https://wokwi.com/projects/390695281576032257
Toggle con polling del rilascio temporizzato con get()
/*Alla pressione del pulsante si attiva o disattiva il lampeggo di un led*/
#include "urutils.h"
int led = 13;
int led2 = 27;
byte pulsante = 12;
bool stato = LOW;
DiffTimer t1;
DiffTimer debt;
void blink(byte led) {
digitalWrite(led, !digitalRead(led));
}
void setup() {
Serial.begin(115200);
pinMode(led, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(pulsante, INPUT);
t1.start();// attivazione blink
}
// loop principale
void loop() {
if (digitalRead(pulsante)) {// polling pulsante non premuto
debt.start();
}
if (debt.get() > 50 && digitalRead(pulsante) == LOW) { // disarmo del timer al timeout
debt.stop(); // disarmo del timer
debt.reset();
stato = !stato;
digitalWrite(led2, stato);
}
if (t1.get() > 1000) { // polling timer blink
t1.reset(); // riarmo timer blink
blink(led);
}
delay(10);
}
Schedulatore generico realizzato con funzione get()
Il codice precedente è basato su due timers SW indipendenti nel senso che ognuno realizza il polling del tempo corrente separatamente ad ogni ciclo di loop(), cioè, alla massima velocità consentita dal sistema. Se i polling sono in numero limitato questa soluzione non crea grossi problemi ma se invece i timers sono parecchi, allora potrebbe capitare che il carico computazionale del polling possa diventare comparabile al peso dei vari task eseguiti.
E’ di aiuto in questo caso l’utilizzo di uno schedulatore dei compiti, ovvero di un codice che, a partire da un tempo base comune, sappia programmare nel tempo (schedulare) i vari compiti (task) affinchè vengano eseguiti esattamente nel tempo assegnato a ciascuno.
Il timer schedulatore è realizzato utilizzando una variante DiffTimer2 del timer della libreria urutils.h in cui, ad ogni chiamata della funzione get(), viene incrementato il tempo corrente di ciascun timer (elapsed) di una quantità fissa pari al tempo base. Il momento dell’incremento è contestuale a quello della chiamata a get() che, quindi, deve avvenire ogni tempo base. Il tempo base è il M.C.D. dei tempi in gioco nei vari task.
Il timer schedulatore è diverso per ciascun task, ma tutti i timer di questo tipo hanno a comune lo stesso tempo base in base al quale incrementano internamente il proprio tempo corrente. Il tempo corrente (elapsed) è calcolato separatamente per ogni timer schedulatore e quindi azzerato, tramite la funzione reset(), con una periodicità che è diversa per ciascuno.
La periodicità è stabilita dalla condizione sulla funzione get() che valuta l’avvenuto scadere del timeout. Il polling sulla condizione di timeout non avviene alla massima velocità del microprocessore (variabile da pezzo a pezzo) ma, in maniera più precisa e, soprattutto, più rada, ad ogni tempo base.
Il timer schedulatore non possedendo un riferimento che tiene il tempo internamente ad esso (ad es. una millis()), deve essere richiamato da una funzione esterna esattamente allo scoccare di ogni tempo base.
Il tempo base viene generato utilizzando il timer DiffTimer1 che realizza, mediante il polling della sua funzione get(), il polling della funzione millis() che restituisce il tempo corrente del sistema.
Il tempo base viene comunicato a ciascun timer schedulatore attraverso un argomento della funzione get().
/*
Alla pressione del pulsante si attiva o disattiva il lampeggo di un led, mentre un
altro led lampeggia indisturbato.
*/
#include "urutils.h"
int led = 13;
int led2 = 14;
byte pulsante =12;
byte precval, val;
unsigned long tbase = 50;
DiffTimer tmrdeb;
DiffTimer2 tmrblink1, tmrblink2;
void setup() {
Serial.begin(115200);
pinMode(led, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(pulsante, INPUT);
precval=LOW;
tmrdeb.start();
tmrblink2.start();
tmrblink1.setBase(tbase);
tmrblink2.setBase(tbase);
}
// loop principale
void loop() {
if(tmrdeb.get() > tbase){
tmrdeb.reset();
//task_toggle
val = digitalRead(pulsante);
if(precval==LOW && val==HIGH){ //rivelatore di fronte di salita
tmrblink1.toggle();
}
precval=val;
//task_blink1
if (tmrblink1.get() > 500) {
digitalWrite(led, !digitalRead(led));
tmrblink1.reset();
}
//task_blink2
if (tmrblink2.get() > 1000) {
digitalWrite(led2, !digitalRead(led2));
tmrblink2.reset();
}
}
delay(10);
}
Di seguito il link della simulazione online con ESP32 su Wokwi: https://wokwi.com/projects/388359604541585409
Si noti che l’ordine di apparizione dei task all’interno del codice del loop potrebbe non rispecchiare l’ordine con cui gli stessi vengono eseguiti, cioè l’ordine di esecuzione avviene in maniera asincrona rispetto al codice, secondo il principio della cosidetta programmazione ad eventi. Eventi possono attivare o disattivare altri eventi in base ad input esterni oppure in base al valore raggiunto da certe variabili di stato.
Questo esempio conclude tutte le tecniche possibili per programmare eventi nel tempo in un sistema a microprocessore che quindi potrebbero essere riassunte in: delay nel loop(), delay nei thread, timer SW nel loop(), timer HW, timer schedulatori per progettare complessivamente uno scheduler che realizzi la tecnica del multitasking a partire da un riferimento temporale esterno scelto tra millis(), delay(), interrupts di timer HW.
Pulsante toggle basato su interrupts e timer HW
Per una discussione generale sugli interrupt si rimanda a interrupt.
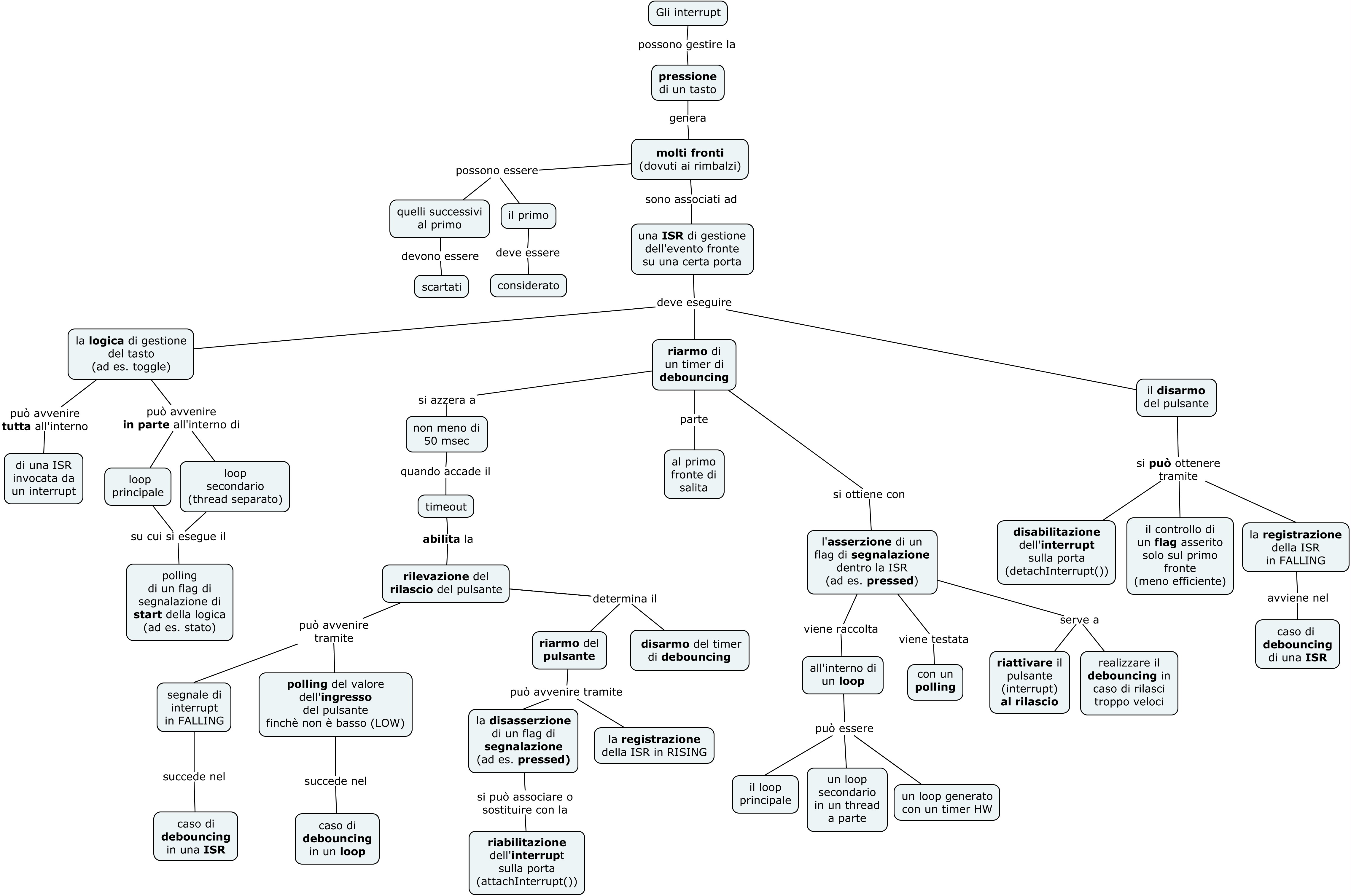
All’ingresso di una porta digitale viene associata una callback che viene invocata alla ricezione di un segnale di interrupt attivo su entrambi i fronti. Il fronte di salita, selezionato prendendo solo i valori HIGH, potrebbe essere rilevato molte volte consecutivamente a causa del fenomeno dei rimbalzi. Per evitare la rilevazione dei fronti spuri successivi al primo, viene disabilitata, dentro la ISR, la loro rilevazione disarmando gli interrupt mediante l’istruzione detachInterrupt(digitalPinToInterrupt(pulsante)).
Il tempo per la riabilitazione (riarmo) dell’interrupt non deve essere ne troppo presto, cioè minore di 50 msec, altrimenti si finisce per leggere dei rimbalzi ma neppure troppo tardi, cioè dopo la pressione di un tasto, altrimenti si perdono degli input dell’utente. Il momento migliore per riabilitare gli interrupt potrebbe essere il momento del rilascio del pulsante, dato che precede sempre una eventuale successiva pressione. In ogni caso, un timer impedisce quei tentativi di riabilitazione che potrebbero avvenire prima dei 50 msec utili ad evitare i rimbalzi.
Il timer è di tipo one shot e viene riarmato solo se un polling della porta del tasto fornisce ancora valore alto (tasto premuto se in pull down). Se invece fornisce valore basso, non viene riarmato il timer ma viene riarmato al suo posto l’interrupt del tasto mediante l’istruzione attachInterrupt().
Allo scadere del timeout viene eseguita la callback waitUntilInputLow() all’interno della ISR del timer. La funzione esegue una nuova lettura del valore della porta:
- se è HIGH allora deduce che il pulsante è ancora premuto e decide di aspettare ancora altri 50 msec riavviando il timer di rilevazione del fronte di discesa
- se è LOW allore deduce che il pulsante è stato rilasciato e decide di riabilitarlo ad una nuova pressione (riarmo) disasserendo il fag di disabilitazione
pressed.
La funzione di debouncing è garantita introducendo un tempo minimo di attesa tra un campionamento e l’altro.
Per mantenere la ISR chiamante il più veloce possibile, viene spostato nel loop() l’algoritmo di blink basato sui delay(), dove può fare il suo lavoro industurbato essendo l’unico task (suscettibile ai ritardi) presente.
Le attese sono tutte non bloccanti e realizzate tramite un timer HW che adopera esso stesso gli interrupt per richiamare la funzione di servizio (callback) da eseguire allo scadere del timeout. Il timer, utilizzando gli interrupt, è in grado di intervenire in tempo in tutte le situazioni, eventualmente anche interrompendo l’esecuzione di istruzioni che impegnino intensamente il loop(). Si tratta sicuramente di una realizzazione che, avendo la massima efficacia possibile in tutte le situazioni, si presta alla realizzazione di dispositivi di sicurezza.
#include <Ticker.h>
/*Alla pressione del pulsante si attiva o disattiva il lampeggo di un led*/
int led = 13;
byte pulsante =12;
volatile bool stato;
#define DEBOUNCETIME 50
Ticker debounceTicker;
void setup() {
Serial.begin(115200);
pinMode(led, OUTPUT);
pinMode(pulsante, INPUT);
attachInterrupt(digitalPinToInterrupt(pulsante), switchPressed, RISING );
stato = false;
}
void switchPressed ()
{
detachInterrupt(digitalPinToInterrupt(pulsante));
debounceTicker.once_ms(50, waitUntilInputLow);
Serial.println("SALITA disarmo pulsante");
stato = !stato; // logica da attivare sul fronte (toggle)
} // end of switchPressed
void waitUntilInputLow()
{
if (digitalRead(pulsante) == HIGH)//se coincide con il valore di un polling
{
Serial.print("Aspetto");
debounceTicker.once_ms(50, waitUntilInputLow);
}else{
Serial.print("DISCESA riarmo pulsante\n");
attachInterrupt(digitalPinToInterrupt(pulsante), switchPressed, RISING );
}
}
// loop principale
void loop() {
if (stato) {
digitalWrite(led, !digitalRead(led)); // inverti lo stato precedente del led
delay(500);
} else {
digitalWrite(led, LOW); // turn the LED off by making the voltage LOW
delay(10);
}
}
Di seguito il link della simulazione online con ESP32 su Wokwi: https://wokwi.com/projects/390289622147259393
Pulsante toggle basato su interrupts e con debounce basato sui delay()
All’ingresso di una porta digitale viene associata una callback che viene invocata alla ricezione di un segnale di interrupt attivo su entrambi i fronti. Il fronte di salita, selezionato prendendo solo i valori HIGH, potrebbe essere rilevato molte volte consecutivamente a causa del fenomeno dei rimbalzi.
Per evitare la rilevazione dei fronti spuri successivi al primo, viene disabilitata, dentro la ISR, la loro rilevazione disarmando gli interrupt mediante l’istruzione detachInterrupt(digitalPinToInterrupt(pulsante)). Contemporaneamente viene asserito un flag di segnalazione, pressed, che comunica ad un loop() di attivare il timer per il riarmo dell’interrupt per rispondere a nuove pressioni dell’utente.
Il tempo per la riabilitazione (riarmo) dell’interrupt non deve essere ne troppo presto, cioè minore di 50 msec, altrimenti si finisce per leggere dei rimbalzi ma neppure troppo tardi, altrimenti si perdono degli input dell’utente. Il momento migliore per riabilitare gli interrupt potrebbe essere il momento del rilascio del pulsante, dato che precede sempre una eventuale successiva pressione. In ogni caso, un timer impedisce quei tentativi di riabilitazione che potrebbero avvenire prima dei 50 msec utili ad evitare i rimbalzi.
/*Alla pressione del pulsante si attiva o disattiva il lampeggo di un led*/
/*Alla pressione del pulsante si attiva o disattiva il lampeggo di un led*/
#include "urutils.h"
int led = 13;
byte pulsante =12;
byte stato= LOW; // variabile globale che memorizza lo stato del pulsante
volatile bool pressed;
#define DEBOUNCETIME 50
DiffTimer debounce;
void setup() {
Serial.begin(115200);
pinMode(led, OUTPUT);
pinMode(pulsante, INPUT);
attachInterrupt(digitalPinToInterrupt(pulsante), switchPressed, RISING );
pressed = false;
}
// Interrupt Service Routine (ISR)
void switchPressed ()
{
detachInterrupt(digitalPinToInterrupt(pulsante));
pressed = true; // disarmo del pulsante e riarmo del timer
stato = !stato; // logica da attivare sul fronte (toggle)
} // end of switchPressed
// loop principale
void loop() {
if(pressed){
waitUntilInputLow(pulsante, 50);
attachInterrupt(digitalPinToInterrupt(pulsante), switchPressed, RISING );
pressed = false;
}
digitalWrite(led, stato); // inverti lo stato precedente del led
delay(10);
}
Simulazione online su ESP32 del codice precedente con Wowki: https://wokwi.com/projects/390288516762524673
Pulsante toggle basato su interrupts e timer debounce con timer SW get()
All’ingresso di una porta digitale viene associata una callback che viene invocata alla ricezione di un segnale di interrupt attivo su entrambi i fronti. Il fronte di salita, selezionato prendendo solo i valori HIGH, potrebbe essere rilevato molte volte consecutivamente a causa del fenomeno dei rimbalzi.
Per evitare la rilevazione dei fronti spuri successivi al primo, viene disabilitata, dentro la ISR, la loro rilevazione disarmando gli interrupt mediante l’istruzione detachInterrupt(digitalPinToInterrupt(pulsante)). Contemporaneamente viene asserito un flag di segnalazione, pressed, che comunica ad un loop() di attivare il timer per il riarmo dell’interrupt per rispondere a nuove pressioni dell’utente.
Il tempo per la riabilitazione (riarmo) dell’interrupt non deve essere ne troppo presto, cioè minore di 50 msec, altrimenti si finisce per leggere dei rimbalzi ma neppure troppo tardi, altrimenti si perdono degli input dell’utente. Il momento migliore per riabilitare gli interrupt potrebbe essere il momento del rilascio del pulsante, dato che precede sempre una eventuale successiva pressione. In ogni caso, un timer impedisce quei tentativi di riabilitazione che potrebbero avvenire prima dei 50 msec utili ad evitare i rimbalzi.
Variante che disabilita gli interrupt spuri fino al rilascio del pulsante:
/*Alla pressione del pulsante si attiva o disattiva il lampeggo di un led*/
#include "urutils.h"
int led = 13;
byte pulsante =12;
byte stato= LOW; // variabile globale che memorizza lo stato del pulsante
volatile bool pressed;
#define DEBOUNCETIME 50
DiffTimer debounce;
void setup() {
Serial.begin(115200);
pinMode(led, OUTPUT);
pinMode(pulsante, INPUT);
attachInterrupt(digitalPinToInterrupt(pulsante), switchPressed, RISING );
pressed = false;
}
// Interrupt Service Routine (ISR)
void switchPressed ()
{
detachInterrupt(digitalPinToInterrupt(pulsante));
pressed = true; // disarmo del pulsante e riarmo del timer
stato = !stato; // logica da attivare sul fronte (toggle)
} // end of switchPressed
void waitUntilInputChange()
{
if (pressed){
debounce.start();// aggiorna il millis() interno solo alla prima di molte chiamate consecutive
if(debounce.get() > DEBOUNCETIME && digitalRead(pulsante) == LOW){// disarmo del timer al timeout
attachInterrupt(digitalPinToInterrupt(pulsante), switchPressed, RISING );
pressed = false; // riarmo del pulsante
debounce.stop(); // disarmo del timer
debounce.reset();
}
}
}
// loop principale
void loop() {
waitUntilInputChange();
if (stato) {
digitalWrite(led, !digitalRead(led)); // inverti lo stato precedente del led
delay(1000);
} else {
digitalWrite(led, LOW); // turn the LED off by making the voltage LOW
delay(10);
}
}
Simulazione online su ESP32 del codice precedente con Wowki: https://wokwi.com/projects/390288516762524673
Variante che ignora gli interrupt spuri fino al rilascio del pulsante:
All’ingresso di una porta digitale viene associata una callback che viene invocata alla ricezione di un segnale di interrupt attivo su entrambi i fronti. Il fronte di salita, selezionato prendendo solo i valori HIGH, potrebbe essere rilevato molte volte consecutivamente a causa del fenomeno dei rimbalzi.
Per evitare la rilevazione dei fronti spuri successivi al primo, viene disabilitata, dentro la ISR, la loro rilevazione non disabilitando gli interrupt ma disabilitando la loro gestione mediante la condizione if(!pressed) che, dopo il primo fronte, non è più soddisfatta. Il flag di segnalazione, pressed, oltre a disabilitare la gestione degli interrupt, comunica ad un loop() di attivare il timer per il riarmo dell’interrupt per rispondere a nuove pressioni dell’utente.
Il tempo per la riabilitazione (riarmo) dell’interrupt non deve essere ne troppo presto, cioè minore di 50 msec, altrimenti si finisce per leggere dei rimbalzi ma neppure troppo tardi, cioè dopo la pressione di un tasto, altrimenti si perdono degli input dell’utente. Il momento migliore per riabilitare gli interrupt potrebbe essere il momento del rilascio del pulsante, dato che precede sempre una eventuale successiva pressione. In ogni caso, un timer impedisce quei tentativi di riabilitazione che potrebbero avvenire prima dei 50 msec utili ad evitare i rimbalzi.
/*Alla pressione del pulsante si attiva o disattiva il lampeggo di un led*/
#include "urutils.h"
int led = 13;
byte pulsante =12;
byte stato= LOW; // variabile globale che memorizza lo stato del pulsante
volatile bool pressed;
#define DEBOUNCETIME 50
DiffTimer debounce;
void setup() {
Serial.begin(115200);
pinMode(led, OUTPUT);
pinMode(pulsante, INPUT);
attachInterrupt(digitalPinToInterrupt(pulsante), switchPressed, RISING );
pressed = false;
}
// Interrupt Service Routine (ISR)
void switchPressed ()
{
if(!pressed){ // intervento immediato ma sul primo fronte di salita soltanto (causa disarmo pulsante)
pressed = true; // disarmo del pulsante e riarmo del timer di debouncing
stato = !stato; // logica da attivare sul fronte (toggle)
}
} // end of switchPressed
void waitUntilInputChange()
{
if (pressed){
debounce.start();// aggiorna il millis() interno solo alla prima di molte chiamate consecutive
if(debounce.get() > DEBOUNCETIME && digitalRead(pulsante) == LOW){// disarmo del timer al timeout
pressed = false; // riarmo del pulsante
debounce.stop();
debounce.reset();
}
}
}
// loop principale
void loop() {
waitUntilInputChange();
if (stato) {
digitalWrite(led, !digitalRead(led)); // inverti lo stato precedente del led
delay(1000);
} else {
digitalWrite(led, LOW); // turn the LED off by making the voltage LOW
delay(10);
}
}
Simulazione online su ESP32 del codice precedente con Wowki: https://wokwi.com/projects/388481409829351425
Pulsante toggle basato su interrupts e debounce nella ISR
Per una discussione generale sugli interrupt si rimanda a interrupt.
Il funzionamento è agevolmente comprensibile alla luce delle seguenti considerazioni:
- L’interrupt è attivo su un solo fronte.
- Al momento del primo bounce in rising del pulsante la condizione
debtimer.get() > DEBOUNCETIMERISEè sempre vera (per cui il flagstatocommuta immediatamente) perchè, dato che la funzione reset() del timer era stata eseguita molto tempo prima (al momento del rilascio del pulsante da parte dell’utente), il tempo attuale misurato dallaget()è molto più grande di un timeout. I bounce successivi al primo, in rising non possono più accadere (pulsante disarmato) dato che adesso l’attachInterrupt è impostata in FALLING, se in falling sono filtrati dal timer impostato nella callbackdebounceFall()che, sebbene diversa, viene chiamata temporalmente molto vicina alreset()di quella in rising precedente. - Al momento del primo bounce in falling del pulsante la condizione
debtimer.get() > DEBOUNCETIMEFALLè sempre vera (per cui il flagstatocommuta immediatamente) perchè, dato che la funzione reset() del timer era stata eseguita molto tempo prima (al momento della pressione del pulsante da parte dell’utente), il tempo attuale misurato dallaget()è molto più grande di un timeout. I bounce successivi al primo, in falling non possono più accadere dato che adesso l’attachInterrupt è impostata in RISING (pulsante riarmato), se in rising sono filtrati dal timer impostato nella callbackdebounceRise()che, sebbene diversa, viene chiamata temporalmente molto vicina alreset()di quella in falling precedente.
Un esempio con l’attuazione nel loop del task di accenesione/spegnimento potrebbe essere:
#include "urutils.h"
const unsigned long DEBOUNCETIMERISE = 50;
const unsigned long DEBOUNCETIMEFALL = 50;
const byte ENGINE = 13;
const byte BUTTONPIN = 12;
volatile bool stato = false;
volatile int count1 = 0;
DiffTimer debtimer;
void debounceRise() {
if (debtimer.get() > DEBOUNCETIMERISE) {// al primo bounce (in rise o in fall) è sempre vero!
Serial.println(count1);
count1 = 0;
stato = !stato; // logica da attivare sul fronte (toggle)
Serial.println("I have catched a RISE");
attachInterrupt(digitalPinToInterrupt(BUTTONPIN), debounceFall, FALLING);// pulsante disarmato!
debtimer.reset();// ogni tipo di fronte resetta il timer
} else {
count1++;
}
}
void debounceFall() {
if (debtimer.get() > DEBOUNCETIMEFALL) {// al primo bounce (in rise o in fall) è sempre vero!
Serial.println(count1);
count1 = 0;
Serial.println("I have catched a FALL");
attachInterrupt(digitalPinToInterrupt(BUTTONPIN), debounceRise, RISING);// pulsante riarmato!
debtimer.reset();// ogni tipo di fronte resetta il timer
} else {
count1++;
}
}
void setup ()
{
Serial.begin(115200);
pinMode(BUTTONPIN, INPUT);
pinMode(ENGINE, OUTPUT); // so we can update the LED
digitalWrite(ENGINE, LOW);
// attach interrupt handler
debtimer.start();
attachInterrupt(digitalPinToInterrupt(BUTTONPIN), debounceRise, RISING);
} // end of setup
void loop ()
{
//Serial.println(pressed);
if (stato) {
digitalWrite(ENGINE, HIGH);
} else {
digitalWrite(ENGINE, LOW);
}
delay(10);
}
Le variabili condivise tra una ISR e il loop() andrebbero protette, da accessi paralleli e concorrenti da parte di entrambe, tramite delle corse critiche che rendano l’accesso strettamente sequenziale. Inoltre le variabili condivise devono sempre essere dichiarate con il qualificatore volatile per forzarne la modifica istantanea anche sui registri della CPU.
Gli accessi paralleli non sono un problema quando le istruzioni sono atomiche, cioè non interrompibili. Le istruzioni atomiche o sono eseguite per intero o non sono eseguite affatto. In questo caso gli accessi, sia in lettura che in scrittura, sono in realtà, a basso livello, intrinsecamente sequenziali.
Nei microcontrollori attuali, in genere nessuna istruzione gode della proprietà di essere atomica con una sola eccezione per la lettura e scrittura delle variabili ad 8 bit. Per le variabili codificate con 8 bit l’accesso a basso livello (linguaggio macchina) è intrinsecamente garantito essere atomico. Per queste variabili rimane comunque la necessita dell’uso del qualificatore volatile.
Le modifiche a valori con codifiche maggiori di 8 bit sono in genere non atomiche, pertanto le variabili a 16 o 32 bit andrebbero gestite con gli interrupt disabilitati (sezione critica). Tuttavia, gli interrupt vengono disabilitati di default durante una routine di servizio di interrupt, quindi, non potendo verificarsi il danneggiamento di una variabile multibyte in una ISR, le sezioni critiche vanno inserite soltanto nel loop().
Le variabili condivise tra ISR e loop() e 8 bit sono stato e count1 che sono state semplicemente dichiarate come volatile senza sezioni critiche su di essa.
- Simulazione online su ESP32 di una del codice precedente con Wowki: https://wokwi.com/projects/388638737495929857
ENCODER ROTATIVO
Esistono varie tipologie di encoder con numeri di step variabili e meccanismi interni differenti. I più comuni ed economici reperibili in giro, basano il loro funzionamento su due switch interni che mutano il loro stato sulla base di una ruota dentata.
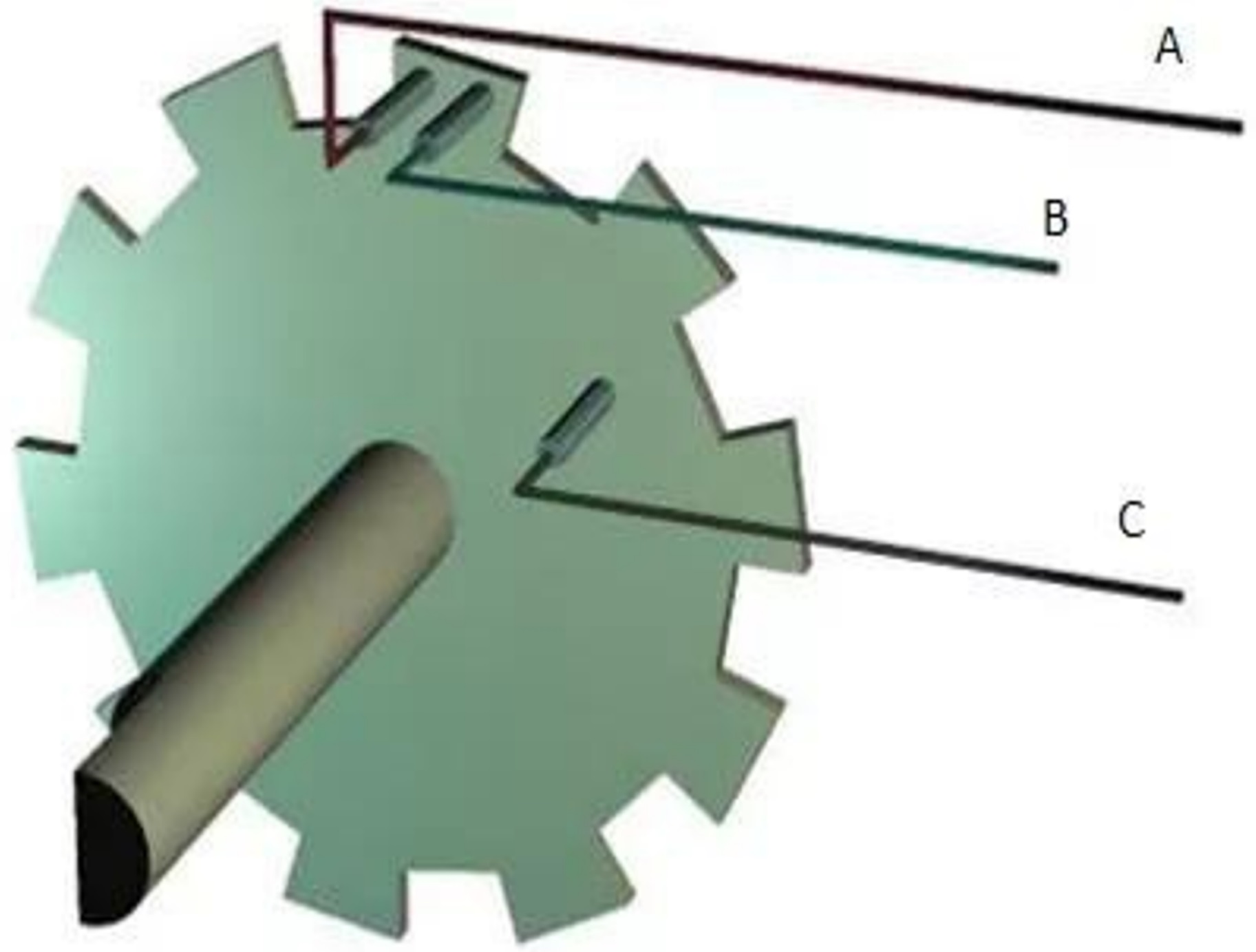
L’ordine con il quale questi switch vengono aperti o chiusi, cioè chi si apre prima o dopo, determina il senso di rotazione.
Un esempio di encoder rotativo potrebbe essere la rotellina del mouse, o la manopola del volume di alcuni impianti HiFi digitali.

Pins:
- CLK. Pin che utilizzeremo per conteggiare le variazioni di stato
- DT. Pin che utilizzeremo per calcolare la direzione
- SW. Switch interno attivabile alla pressione del pomello
- +5V. di Arduino
- GND. GND di Arduino
Il modulo KY-040 include due resistori pull-up interni che collegano i pin CLK e DT a VCC. La simulazione solleva sempre questi pin, anche se si lascia fluttuante il pin VCC.
L’encoder rotativo offre due modalità di interazione:
- Rotazione: è possibile ruotare la manopola facendo clic sulle frecce. La freccia superiore lo ruota di un passo in senso orario, mentre la freccia inferiore lo ruota di un passo in senso antiorario. La rotazione della manopola produrrà segnali digitali sui pin DT e CLK, come spiegato di seguito.
- Pulsante: fare clic sulla manopola per premere il pulsante. Mentre è premuto, il pulsante collega il pin SW con il pin GND. Ogni volta che l’utente ruota la manopola, viene prodotto un segnale LOW sui pin DT e CLK:
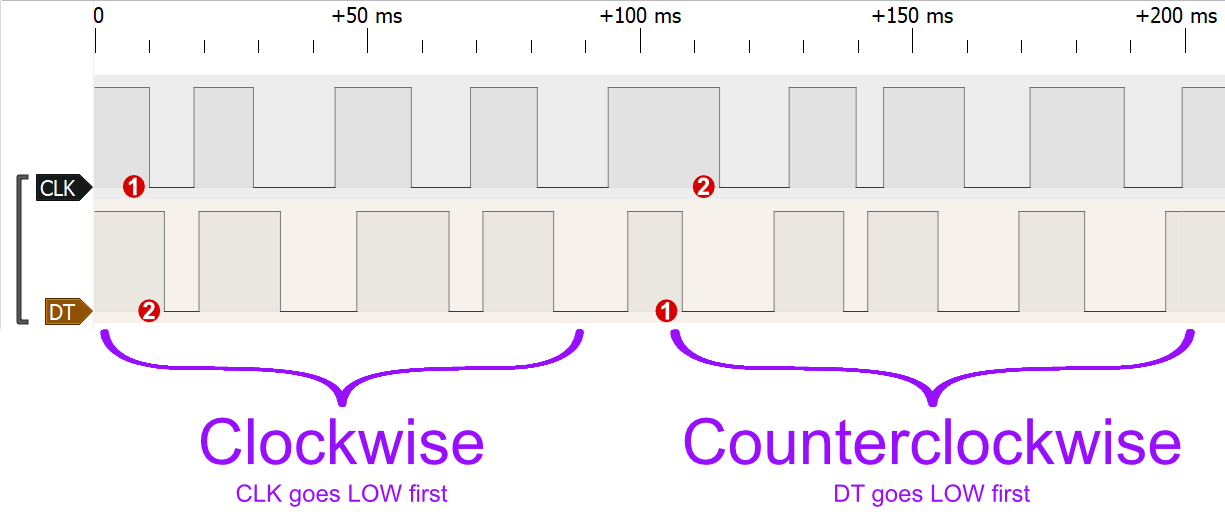
Verso di rotazione:
- La rotazione in senso orario fa sì che il pin CLK si abbassi prima, quindi anche il pin DT si abbassi.
- La rotazione in senso antiorario fa sì che il pin DT si abbassi prima, quindi il pin CLK si abbassi.
Encoder rotativo mediante polling del segnale CK
In questo esempio, l’encoder rotativo è stato gestito con l’algoritmo con cui tipicamente si possono discriminare i fronti di un interruttore a partire dal polling dei livelli dei segnali da questo generato. In questo caso il fronte che viene rilevato direttamente è quello di discesa del piedino CK. L’avvenuto passaggio del fronte sul segnale DT è valutato indirettamente osservando il livello letto sul piedino corrisposndente tramite l’istruzione digitalRead(ENCODER_DT).
// KY-040 Rotary Encoder Example
// Taken from: https://docs.wokwi.com/parts/wokwi-ky-040
// Copyright (C) 2021, Uri Shaked
#define ENCODER_CLK 2
#define ENCODER_DT 3
int a0 = HIGH; // A passato
void setup() {
Serial.begin(115200);
pinMode(ENCODER_CLK, INPUT);
pinMode(ENCODER_DT, INPUT);
}
void loop() {
int a = digitalRead(ENCODER_CLK); // polling di CK attuale
if (a0 == HIGH && a == LOW) { // selezione del FALLING di CK
int b = digitalRead(ENCODER_DT);// polling di DT
if (b == HIGH) { // se DT non è ancora andato in FALLING
Serial.println("Rotated clockwise ⏩");
}
if (b == LOW) { // se DT è già andato in FALLING
Serial.println("Rotated counterclockwise ⏪");
}
}
a0 = a; // il polling del CK attuale diventa il polling del CK precedente
}
- Simulazione online su ESP32 di una del codice precedente con Wowki: https://wokwi.com/projects/389913527165282305
Encoder rotativo mediante interrupt sul segnale CK
In questo esempio, l’encoder rotativo è stato gestito con l’algoritmo con cui tipicamente si possono discriminare i fronti di un interruttore mediante interrupt. In questo caso il fronte che viene rilevato direttamente è quello di discesa del piedino CK. L’avvenuto passaggio del fronte sul segnale DT è valutato indirettamente osservando il livello letto sul piedino corrisposndente tramite l’istruzione digitalRead(ENCODER_DT).
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 20, 4);
#define ENCODER_CLK 2
#define ENCODER_DT 3
#define ENCODER_SW 4
volatile int counter = 0;
void setup() {
// Initialize LCD
lcd.init();
lcd.backlight();
// Initialize encoder pins
pinMode(ENCODER_CLK, INPUT);
pinMode(ENCODER_DT, INPUT);
pinMode(ENCODER_SW, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(ENCODER_CLK), readEncoder, FALLING);
}
void readEncoder() {
int b = digitalRead(ENCODER_DT);
if (b == HIGH) {// DT dopo
counter++; // Clockwise
}
if (b == LOW) {// DT prima
counter--; // Counterclockwise
}
}
// Get the counter value, disabling interrupts.
// This make sure readEncoder() doesn't change the value
// while we're reading it.
int getCounter() {
int result;
noInterrupts(); // inizio corsa critica
result = counter;
interrupts();
return result; // fine corsa critica
}
void resetCounter() {
noInterrupts(); // inizio corsa critica
counter = 0;
interrupts(); // fine corsa critica
}
void loop() {
lcd.setCursor(3, 0);
lcd.print("Counter:");
lcd.setCursor(7, 1);
lcd.print(getCounter());
lcd.print(" ");
if (digitalRead(ENCODER_SW) == LOW) {
resetCounter();
}
}
- Simulazione online su ESP32 di una del codice precedente con Wowki: https://wokwi.com/projects/389923052943921153
Le variabili condivise tra una ISR e il loop() andrebbero protette, da accessi paralleli e concorrenti da parte di entrambe, tramite delle corse critiche che rendano l’accesso strettamente sequenziale. Inoltre le variabili condivise devono sempre essere dichiarate con il qualificatore volatile per forzarne la modifica istantanea anche sui registri della CPU.
Gli accessi paralleli non sono un problema quando le istruzioni sono atomiche, cioè non interrompibili. Le istruzioni atomiche o sono eseguite per intero o non sono eseguite affatto. In questo caso gli accessi, sia in lettura che in scrittura, sono in realtà, a basso livello, intrinsecamente sequenziali.
Nei microcontrollori attuali, in genere nessuna istruzione gode della proprietà di essere atomica con una sola eccezione per la lettura e scrittura delle variabili ad 8 bit. Per le variabili codificate con 8 bit l’accesso a basso livello (linguaggio macchina) è intrinsecamente garantito essere atomico. Per queste variabili rimane comunque la necessita dell’uso del qualificatore volatile.
Le modifiche a valori con codifiche maggiori di 8 bit sono in genere non atomiche, pertanto le variabili a 16 o 32 bit andrebbero gestite con gli interrupt disabilitati (sezione critica). Tuttavia, gli interrupt vengono disabilitati di default durante una routine di servizio di interrupt, quindi, non potendo verificarsi il danneggiamento di una variabile multibyte in una ISR, le sezioni critiche vanno inserite soltanto nel loop().
Le variabile condivisa tra ISR e loop() e 8 bit è stato ed è stata dichiarata come volatile e ogni suo accesso (in lettura e scrittura) è stato racchiuso in una sezione critica dove l’acccesso parallelo è stato disabilitato in favore di uno strettamente sequenziale che garantisce l’atomicità delle istruzioni in essa racchiuse.
Per quanto riguarda le sezioni critiche si può approfondire in sezioni critiche
Gli encoder differenziali, poichè internamente sono dei normalissimi interruttori, sono soggetti anch’essi aal fenomeno dei rimbalzi e all’usura che progressivamente accentua quel fenomeno. Per applicazioni pratiche effettive, è conveniente utilizzare delle implementazioni capaci di tenerne conto. Per questo e altro vedere Encoder rotativo
JOISTICK ANALOGICO
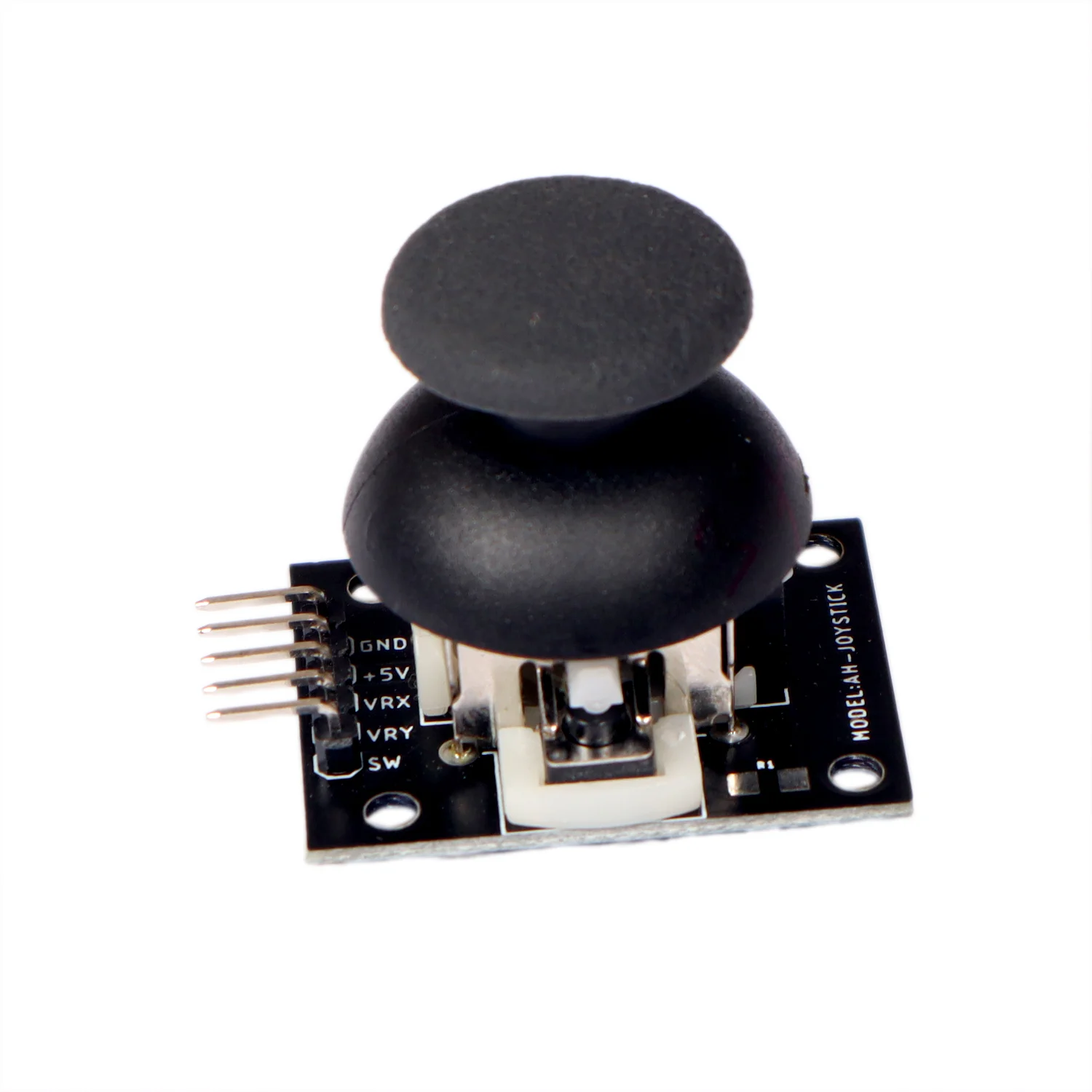
Pins:
- Vcc. Alimentazione positiva
- VERT. Uscita verticale analogica
- HORZ. Uscita orizzontale analogica
- SEL. Pulsante
- GND. Massa
Il joistick è realizzando combinando, su due assi separati ed ortogonali, due potenziometri rotativi che realizzano due partitori di tensione. L’ingresso dei partitori è polarizzato con l’alimentazione positiva Vcc, per cui l’uscita restituisce per entrambi una tensione compresa tra Vcc e 0V, a seconda dell’ammontare della rotazione.
La tensione in uscita al partitore rappresenta la quantità della rotazione e deve misurata dal microcontrollore tramite una periferica ADC di conversione del segnale da analogico a digitale. L’ADC è collegato di base a tutte le porte analogiche di un microcontrollore.
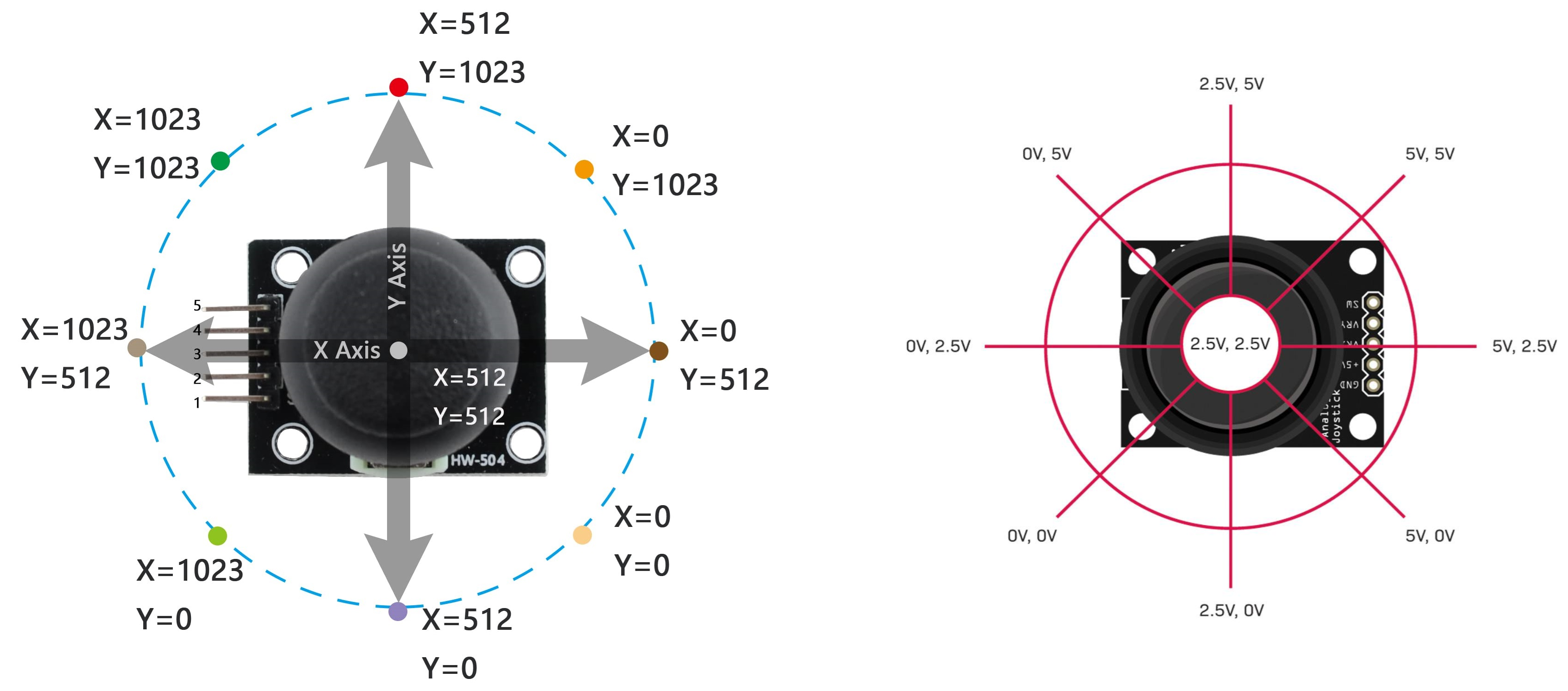
La quantizzazione della conversione per la maggior parte dell MCU, come Arduino o ESP32, è a 10 bit, circostanza che limita la risoluzione della misura a 1024 livelli di tensione, e quindi saranno dello stesso numero anche i diversi campioni di rotazione misurabili con una escursione da un estremo all’altro di uno dei due assi del joistick.
Anche se sembra strano, l’ADC a 10 bit di Arduino (1024 valori) è più preciso e affidabile di quello a 12 bit dell’ESP32 (4096 valori). La quantizzazzione nella MCU ESP32 è sensibilmente non lineare, soprattutto in prossimità dei valori estremi. In sostanza, ciò significa che l’ESP32 non è in grado di distinguere un segnale di 3,2 V e 3,3 V: il valore misurato sarà lo stesso (4095). Allo stesso modo, l’ESP32 non distinguerà tra un segnale 0 V e 0,2 V per piccole tensioni. Si può provare a calibrare l’ADC per ridurre le non linearità attarverso un mappaggio SW, come decritto quì.
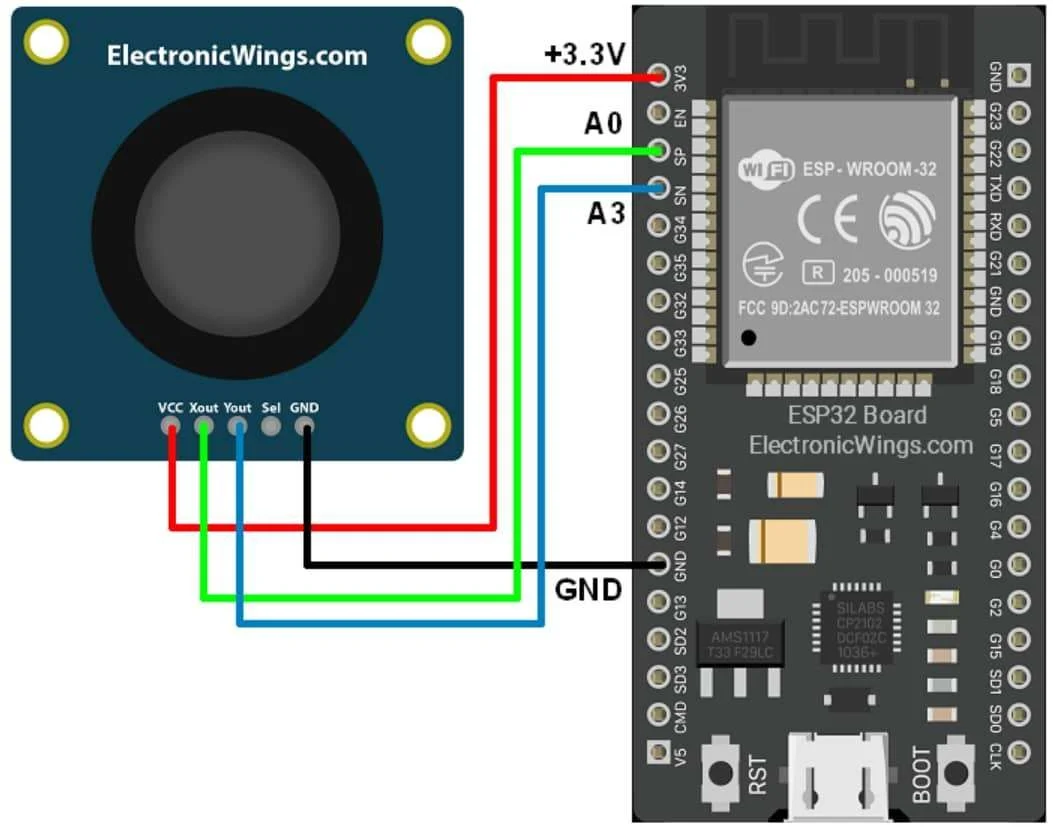
#define VERT_PIN A3
#define HORZ_PIN A0
#define SEL_PIN 2
void setup() {
Serial.begin(115200);
pinMode(VERT_PIN, INPUT);
pinMode(HORZ_PIN, INPUT);
}
void loop() {
int x = analogRead(VERT_PIN);
int y = analogRead(HORZ_PIN);
bool selPressed = digitalRead(SEL_PIN) == LOW;
Serial.print("x: ");Serial.print(x); Serial.print(" y: ");Serial.println(y);
delay(500);
}
Simulazione di una MCU ESP32 con Wokwi: https://wokwi.com/projects/391096564707796993
Per altre informazioni sul joistick analogico va su joistick.
ESERCIZI SU PULSANTI (NORMALI E TOGGLE) E TASK CONCORRENTI
Es1
1) Creare un programma che realizzi l’accesione di due led. Uno ogni mezzo secondo in modalità “normale” ed uno ogni scendo in modalità “drain”. 2) Svolgere lo stesso esercizio di cui sopra ma fare in modo che il blink di uno dei led duri soltanto 10 lampeggi.
- https://wokwi.com/projects/378094177285037057
- https://wokwi.com/projects/378093455257452545
Es2
Creare un programma che gestisca l’accensione di due led (uno in modo drain e l’altro normale) in maniera tale che: - led1 blinki mezzo secondo per 5 volte dopo di che blinki ogni secondo - led2 blinki un secondo per 5 volte dopo di che blinki ogni mezzo secondo
- https://wokwi.com/projects/381214153548600321
Es3
Creare un programma che gestisca l’accensione di due led (uno in modo drain e l’altro normale) in maniera tale che:
- il led1 blinki ogni mezzo secondo
- il led2 blinki ogni secondo
- il led2 parta dopo che il led1 abbia blinkato per 3 volte e si sia spento
- il led1 si riaccenda dopo che il led2 abbia blinkato per due volte e si sia spento
https://wokwi.com/projects/381214508523057153
Es4
Realizzare un programma arduino che faccia lampeggiare un led mentre un altri tre led (rosso, verde e giallo) realizzano la tempistica di un semaforo.
- https://wokwi.com/projects/379451315100484609
- https://wokwi.com/projects/379449185988576257
- https://wokwi.com/projects/379393885414092801
Es5
Scrivere e simulare un programma (arduino o esp32) che realizzi l’accensione di ul led funchè si preme un pulsante e contemporaneamente il blink di un’altro.
- https://wokwi.com/projects/379577438032393217
Es6
Scrivere un programma (arduino o esp32) che realizzi un blink di un led giallo fino a che si tiene premuto un pulsante e realizzi pure il blink di un led verde quando viene premuto un altro pulsante.
- https://wokwi.com/projects/381194244081573889
- https://wokwi.com/projects/381194871814782977
Es7
Scrivere e simulare un programma (arduino o esp32) che realizzi l’accensione di un led finchè si preme un pulsante e, contemporaneamente, il blink di un altro led.
- https://wokwi.com/projects/379577438032393217
- https://wokwi.com/projects/381114962105698305
Es8
Compilare un progetto con esp32 che realizzi il comando di accensione/spegnimento di un led in modo toggle con una pressione sullo stesso tasto (una pressione accende, la successiva spegne).
- https://wokwi.com/projects/381115546873501697
Es9
Come sopra, ma con la variante che, solo quando il primo led è accesso, la pressione di un secondo pulsante accende/spegne in modo toggle il blink di un secondo led. Se il primo led è spento il secondo pulsante non fa nulla.
- https://wokwi.com/projects/381120076068796417
- https://wokwi.com/projects/381116393250548737
URUTILS
I prossimi esercizi sono realizzati adoperando la libreria che si può scaricare cliccando col tasto sinistro sul link urutils.h.
Una volta aperta la pagina, per scaricarla premere la freccetta di download in alto a destra.
Es10
Creare un programma per esp32 che realizzi con 4 led l’effetto supercar inserbile e disinseribile in modo toggle con un pulsante.
- https://wokwi.com/projects/381192229624334337
Es11
Lo stesso di prima ma con un blink di un led a parte che deve rimanere insensibile ai comandi che agiscono sui led supercar (nessun ritardo).
- https://wokwi.com/projects/381192787395509249
Es12
Fare un toggle che accende un led dopo 4 volte che si preme un pulsante e lo spegne dopo 2 (suggerimento: prevedere un tempo massimo complessivo per le pressioni di 1 sec).
- https://wokwi.com/projects/381191721792664577
Es13
Creare un programma per esp32 che realizzi l’accensione di un led su 4 alla prima pressione, di un secondo led alla seconda, di un terzo alla terza.
- https://wokwi.com/projects/381146888228329473
Es14
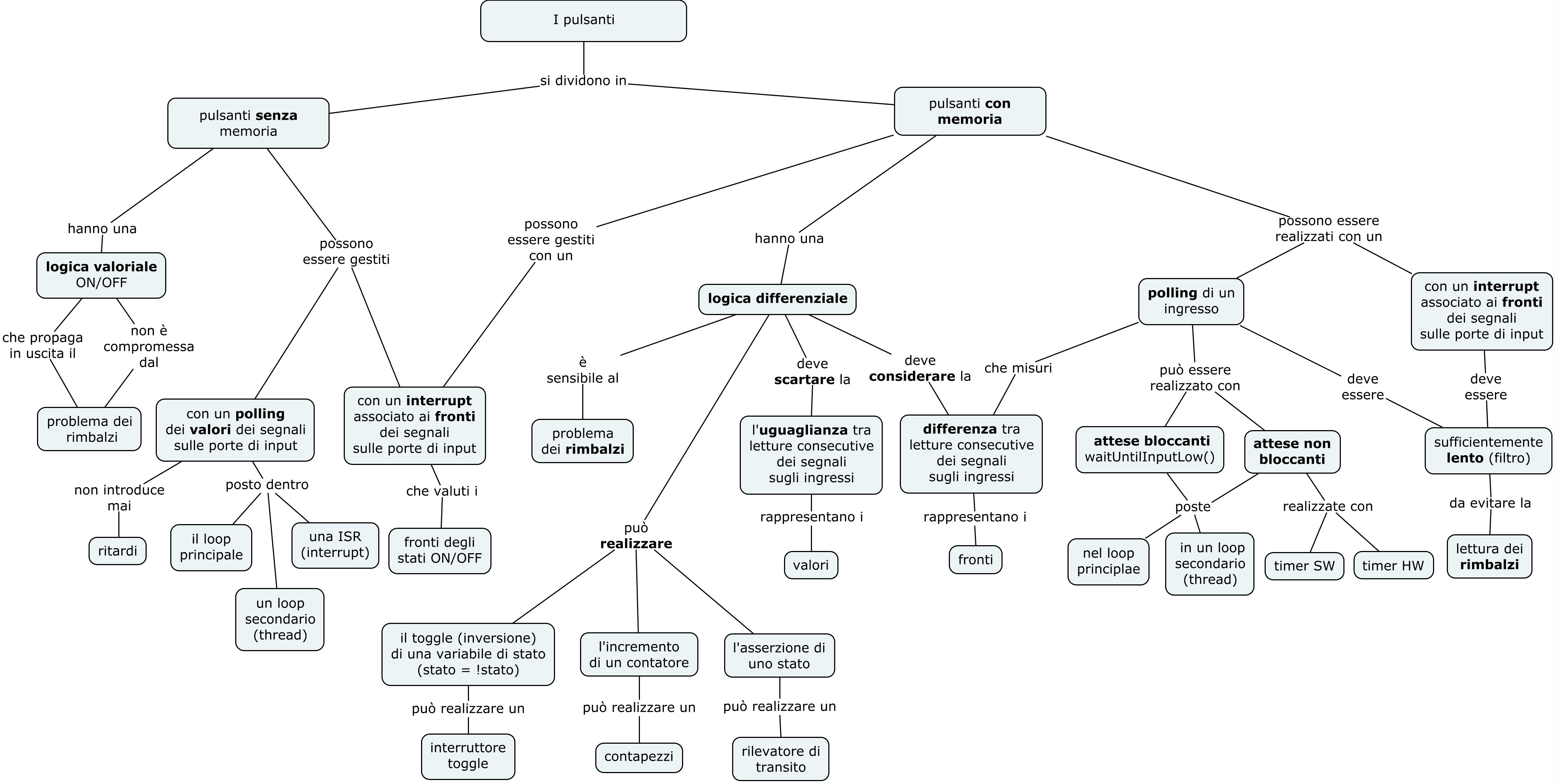
- Scrivere un programma in esp32 che realizzi un pulsante che accende un led solo finchè esso è premuto (pulsante senza memoria).
- https://wokwi.com/projects/348779417449792082
- Al codice precedente aggiungere che alla pressione del tasto, oltre ad accendere un led, venga anche mantenuto il blink (lampeggio) continuo di un secondo led. Sia accensione continua del primo led che il blink del secondo, ovviamente, si interrompono non appena si rilascia il pulsante.
- https://wokwi.com/projects/348779417449792082
- Al codice di cui sopra, aggiungere un secondo tasto che realizzi, in modo toggle (tasto con memoria), l’accensione di un terzo led.
- https://wokwi.com/projects/381144987021586433
- https://wokwi.com/projects/381122295298210817
- Al codice precedente aggiungere che il toggle inibisca completamente l’effetto del primo tasto, lasciando tutto spento, quando lo stato del toggle è false mentre lo riabilita quando lo stato del toggle è true.
- https://wokwi.com/projects/381145527357009921
Es15
- Scrivere un programma in esp32 che realizzi un pulsante che quando esso è premuto accenda un led verde e ne spenga uno rosso. Quando si rilascia deve accadere esattamente il viceversa.
- https://wokwi.com/projects/381379298406892545
- Al codice di cui sopra, aggiungere un secondo tasto che realizzi, in modo toggle (tasto con memoria), il blink di un terzo led.
- https://wokwi.com/projects/381379835699414017
- Al codice precedente aggiungere che alla pressione del primo tasto, parta pure un contatore di secondi. Dopo 10 secondi si deve attivare il toggle del terzo led.
- https://wokwi.com/projects/381380050178326529
- https://wokwi.com/projects/381380815530919937
Es16
- Scrivere un programma in esp32 che realizzi un pulsante che quando esso è premuto accenda il blink alternato di due led giallo e rosso. Quando si rilascia deve rimanere attivo solo il led rosso.
- https://wokwi.com/projects/381412873080576001
- Al codice di cui sopra, aggiungere un secondo tasto che realizzi, in modo toggle (tasto con memoria), il blink di un terzo led ma solo se il pulsante precedente è rilasciato.
- https://wokwi.com/projects/381413194370570241
- Al codice precedente aggiungere che alla pressione del primo tasto, parta pure un contatore di secondi. Dopo 5 secondi si deve attivare il toggle del terzo led.
- https://wokwi.com/projects/381413625688702977
Es17
- Scrivere un programma che accenda due led con un tasto senza memoria. Quando il tasto è premuto, il primo led lampeggia due volte dopodichè il secondo lampeggia tre volte, dopodichè entrambi lampeggiano indefinitivamente.
- https://wokwi.com/projects/381751605001285633
- Dato l’esercizio al punto precedente, aggiungere un secondo tasto e un terzo led. Il nuovo tasto azionato in modo Toggle, fa lampeggiare il terzo led oppure lo spegne. Fare in modo che quando i primi due led lampeggiano insieme il secondo tasto cambi stato una sola volta.
- https://wokwi.com/projects/381413194370570241
- Al codice precedente aggiungere la funzione che spegne il lampeggio sul terzo led dopo un tempo di 10 secondi (timer UR in dispensa).
- https://wokwi.com/projects/381754353576022017
Es18
- Scrivere un programma che accenda due led con un tasto senza memoria. Quando il tasto è premuto, il primo led lampeggia dieci volte, dopodichè entrambi lampeggiano alternativamente indefinitivamente.
- https://wokwi.com/projects/381756214350758913
- Dato l’esercizio al punto precedente, aggiungere un secondo tasto e un terzo led. Il nuovo tasto azionato in modo Toggle, fa lampeggiare il terzo led con il codice morse delll’SOS (tre impulsi brevi, tre lunghi e di nuovo tre brevi). Una pressione successiva del tasto lo fa blinkare normalmente.
- https://wokwi.com/projects/381758116826337281
- Al codice precedente aggiungere la funzione che spegne l’esecuzione dell’SOS dopo 10 secondi. Dopo 20 secondi il led SOS smette pure di blinkare (timer UR in dispensa).
- https://wokwi.com/projects/381759436108030977
Es19
- Scrivere un programma che accenda due led con un tasto senza memoria. Quando il tasto è premuto, il led lampeggiano 5 volte alternativamente in maniera rapida, dopodichè entrambi lampeggiano alternativamente in maniera più lenta per un tempo indefinito.
- https://wokwi.com/projects/381764658556760065
- Dato l’esercizio al punto precedente, aggiungere un secondo tasto e un terzo led. Il nuovo tasto azionato in modo Toggle, fa lampeggiare i l terzo led in maniera alternata e rapida per un tempo indefinito. Una seconda pressione lo fa lampeggiare indefinitivamente in maniera più lenta.
- https://wokwi.com/projects/381767106528833537
- Al codice precedente aggiungere la funzione che misura il tempo x in cui si preme il tasto con memoria e al suo rilascio fa lampeggiare periodicamente il terzo led con un periodo pari ad x (timer UR in dispensa).
- https://wokwi.com/projects/381773540992974849
Es20
- Scrivere un programma che accenda insieme led con un tasto senza memoria. Quando il tasto è premuto, il led lampeggiano 4 volte insieme, dopodichè entrambi lampeggiano alternativamente uno alla volta 4 volte per un tempo indefinito. A tasto rilasciato rimane acceso il secondo led.
- https://wokwi.com/projects/381781410707068929
- Dato l’esercizio al punto precedente, aggiungere un secondo tasto e un terzo led. Il nuovo tasto azionato in modo Toggle, fa lampeggiare il secondo led secondo la logica al punto 1) se lo stato è true, altrimenti sta spento.
- https://wokwi.com/projects/381782303090374657
- Al codice precedente aggiungere la funzione che misura il tempo x per cui si preme il primo tasto con memoria. Questo tempo diventa la durata complessiva del blink del terzo tasto (timer UR in dispensa).
- https://wokwi.com/projects/381782735128863745
Es21. Timer monostabile
Scrivere un programma che realizzi l’accensione di un led tramite un pulsante temporizzato che spegne il led dopo un numero di ms impostati da setup. La logica del tasto deve essere senza stato e deve essere sensibile al fronte di salita del segnale. Immaginare un collegamento pull down del tasto.
- https://www.tinkercad.com/things/fCpauVnNUZh-accensione-led-monostabile/editel
Es22. Curva pericolosa1
Realizzare un programma Arduino che dati 4 led (led1, led2, led3, led4) realizza un indicatore di curva pericolosa che accende i led in sequenza con un incremento circolare. Usare un tasto che può essere premuto in successione per accendere o spegnere l’indicatore (toggleH). Supponiamo che il tasto è collegato secondo lo schema pull down.
- https://www.tinkercad.com/embed/fypoZVpvuSa?editbtn=1
Es23. Selezione luci
Scrivere un programma che realizzi l’accensione di un led, due led o tre led tramite la pressione consecutiva di un pulsante una, due o tre volte all’interno di un intervallo temporale di un secondo. Col la pressione prolungata dello stesso pulsante si spengono tutti e tre contemporaneamente. (Realizzazione del timer senza schedulatore)
- https://www.tinkercad.com/things/1EIcEp5BkZt-copy-of-selezione-luci-e-spegnimento-con-un-solo-tasto/editel?tenant=circuits
Es24. Scegli chi con un tasto
Scrivere un programma che realizzi l’accensione del led1, oppure del led2 oppure del led3 led tramite la pressione consecutiva di un pulsante una, due o tre volte all’interno di un intervallo temporale di un secondo. Col la pressione per almeno un secondo, ma meno di tre, dello stesso pulsante si accendono tutti i led, con la pressione dello stesso tasto per più di tre secondi si spengono tutti i led.
- https://www.tinkercad.com/things/92WnWXH0OvB-copy-of-scegli-chi-onoff-con-un-tasto/editel?tenant=circuits
Es25. Scegli chi con due tasti
Scrivere un programma che realizzi l’accensione del led1, oppure del led2 oppure del led3 led tramite la pressione consecutiva di un pulsante una, due o tre volte all’interno di un intervallo temporale di un secondo. Col la pressione di un altro pulsante si fa una cosa analoga per spegnerli.
- tenant=circuitshttps://www.tinkercad.com/things/1eJwTOD7t8K-copy-of-scegli-chi-onoff/editel?tenant=circuits
Es26. Singolo nastro trasportatore
1) Scrivere un programma che realizzi la gestione di un nastro traportatore attraverso la lettura di tre sensori di transito (barriere ad infrarossi) e il comando di un motore. I sensori permangono al livello alto finchè un oggetto ingombra l’area del sensore, dopodichè vanno a livello basso. I sensori sono due all’inizio del nastro (uno per i pezzi bassi ed un’altro per quelli alti) ed uno alla fine del nastro che rileva il pezzo pronto per essere prelevato. Esiste un timer di volo, così chiamato perchè dura esattamente per il tempo che impiegherebbe il pezzo più lontano dall’uscita, cioè quello sulla barriera di ingresso, per arrivare sulla barriera di uscita. All’attivazione di un qualsiasi sensore di ingresso parte il motore e si resetta e pure si blocca il timer di volo. All’attivazione del sensore di uscita si blocca il nastro, alla sua disattivazione riparte il nastro e parte il timer di volo. Allo scadere del timer di volo si spegne il motore. 3) Aggiungere la funzione di blink di un led quando il nastro trasportatore è in movimento.
- https://www.tinkercad.com/things/bKP671nY2MU-copy-of-nastrouno/editel?tenant=circuits
- algoritmo nastro trasposrtatore nastro
Es27. Conta numeri
Realizzare un programma Arduino che dati due led, led1 e led2 ed un tasto, conta il numero di volte che si preme il tasto e si accende il led1 quando si raggiungono 10 pressioni e quando si raggiungono le 20 si accende il led2, mentre quando si raggiungono le 30 si spegne tutto e si ricomincia da 0. Se è possibile, rendere, in qualche modo, le pressioni insensibili ai rimbalzi del tasto.
- https://www.tinkercad.com/things/6toP0Dc3v0x-copy-of-conta-numeri-schedulato/editel?tenant=circuits
Es28. Timers HW 1
1) Concepire un SW per ESP32 che realizzi un blink di due led con tempi diversi e l’accensione di un led dopo 5 secondi dalla pressione di un pulsante e il suo automatico spegnimento dopo 10 secondi dalla sua accensione.
https://wokwi.com/projects/387795448199864321
4) Concepire un SW per ESP32 che realizzi un blink periodico di un led fino a che l’utente non preme un pulsante di spento. Con uno di acceso riprende. Realizzarlo in due modi: usando solo .once_ms usando solo .attach_ms
Es29. Semaforo
Realizzare un semaforo utilizzando soltanto timer HW.
https://wokwi.com/projects/387790093070138369
Es30. Orchestra
Scrivere un programma per esp32 che realizzi la gestione di 4 led: uno che fa 100 bpm (battiti per munuto) uno che fa 25 bpm uno ogni tre battiti del primo led Realizzare il tutto con la schedulazione generica basata sui get (no delay, no timer HW, no thread).
https://wokwi.com/projects/388980248362009601
Es31. Simulazione vita
Scrivere un programma per esp32 che realizzi la gestione di un led che fa dieci blink da mezzo secondo e poi 5 da uno e ricomincia. Realizzare il tutto con la schedulazione basata sui get (no delay, no timer HW, no thread).
https://wokwi.com/projects/388978976877511681
Es32. Luminosità led con encoder rotativo
Scrivere un programma per esp32 che realizzi la regolazione della luminosità di un led attraverso la variazione degli scatti di un encoder rotativo. Fare in modo che la luminosità sia nulla a zero scatti e massima a 20 (1 giro completo).
https://wokwi.com/projects/390527818943920129
Es33. Fading successivo di 3 led
Scrivere un programma che accenda completamente un led dopo una rotazione completa di un encoder rotativo e, dopo, accenda completamente un altro led dopo 4 giri, ed accenda un terzo led dopo dieci giri. Rifare lo spegnimento con le operazioni contrarie.
https://wokwi.com/projects/390876776704923649
Es34. Navigazione mappa interrupt
Consegnare un esempio completo per ogni scenario possibile di gestione presente nella mappa concettuale degli interrupt utilizzandoli tutti per accendere e spegnere un led mentre contemporaneamente ne blinka un’altro. Valutare e segnare pro e contro di ogni soluzione.
Interrupt:
- Con polling del rilascio (e debouncing) in un loop generato con timer HW: https://wokwi.com/projects/390920656468342785
- Con polling del rilascio (e debouncing) in un loop generato con timer SW: https://wokwi.com/projects/390921685594360833
- Con polling del rilascio (e debouncing) nel loop principale con le attese (delay): https://wokwi.com/projects/390922370464465921
- Con polling del rilascio (e debouncing) nella ISR: https://wokwi.com/projects/390923700676500481
Es35. Ancora fading successivo di 3 led
Scrivere un programma che accenda completamente un led dopo due rotazioni complete di un encoder rotativo e, dopo, accenda completamente un altro led dopo 3 giri, ed accenda un terzo led dopo 5 giri. Rifare lo spegnimento con le operazioni contrarie.
https://wokwi.com/projects/390925418313291777
Es36. Navigazione mappa pulsanti
Consegnare un esempio completo per ogni scenario possibile di gestione presente nella mappa concettuale dei pulsanti utilizzandoli tutti per accendere e spegnere un led (con o senza memoria) mentre contemporaneamente ne blinka un’altro. Fare presente e segnare pro e contro di ogni soluzione.
- Pulsante senza memoria non responsivo https://wokwi.com/projects/391102164130146305
- Pulsante senza memoria responsivo con get https://wokwi.com/projects/391105027631947777
- Pulsante senza memoria responsivo con i thread https://wokwi.com/projects/391106418377249793
- Pulsante senza memoria responsivo con i timer HW https://wokwi.com/projects/391107103111045121
- pulsante con memoria con get: https://wokwi.com/projects/391108412935624705
- pulsante con memoria con delay: https://wokwi.com/projects/391108833341231105
- pulsante con memoria con i thread: https://wokwi.com/projects/391109183918999553
- pulsante con memoria con i timer HW: https://wokwi.com/projects/391109387683542017
- pulsante con memoria con get2: https://wokwi.com/projects/391110569888045057
Es37. Erogatore per gatti
Automatizzare un erogatore di crocchette che vengono distribuite fa un ugello a tempo. 30 g sono eragati in 5 secondi. L’erogatore é attivato dalla pressione del musetto del gatto. Erogati il cibo l’erogatore si disattiva per un’ora (emulati con 10 secondi). Le erogazioni sono contate e non devono superare le 6. L’erogatore viene riabilitato (resettando il contatore) dal padrone una vilta al giorno premendo un pulsante.
Es38. Trappola per topi
Una scatola con una porta a scatto elettrica contiene un’esca. Quando il topo é entrato tutto la porta si chiude. Con un pulsante la porta si apre e fa uscire il topo a Topolinia.
NB: Il pulsante é premuto il topo sta entrando. Ho letto il fronte di salita e so che sta entrando. Leggo dopo il fonte di discesa, dello stesso pulsante (barriera luminosa) e so che é conpletamente entrato.
https://wokwi.com/projects/392867901924989953
Es39. Macchina del caffè
Un distributore automatico di caffè ha 4 pulsanti per erogare caffé. Se premi una volta il primo pulsante il caffè é corto, se premi la seconda volta é lungo. Il secondo pulsante sceglie lo zucchero il base al tempo della pressione (Se si vuole si può aumentare la luminosità di un led da 0 a 10 con il PWM se no si stampa con Serial.println()). Il terzo pulsante sceglie se decaffeinato oppure no. Il quarto serve caffè macchiato o meno. Ogni opzione binaria (con due valori) é segnalata dallo stato di un led. Il caffé é pronto dopo un minuto e un cicalino suona.
-
NB1: il contatore di pressioni si può fare eseguendo ad ogni pressione (o rilascio) entrambe le cose seguenti: il riarmo di un timer con t1.start() (tanto è attivo solo alla prima volta) l’incremento del contatore Allo scadere del timer viene eseguito il conteggio: se minore di uno, scelta A; se maggiore di 1, scelta B.
-
NB2: La quantità di zucchero si può scegliere facendo partire un timer alla pressione di un pulsante e facendolo stoppare al suo rilascio. La lettura del get() del timer mi da la misura del ritardo. Decidendo che sopra 10 secondi le misure valgono sempre 10 (tetto superiore), un valore da 0 a 10 dice la quantità di zucchero da stampare con Serial.println(). Ricordarsi che il get() deve stare in un loop non bloccato per potere contare.
https://wokwi.com/projects/391440818569488385
Es40. Cassaforte
Scrivere un programma che verifichi la combinazione di apertura di una cassaforte con un pomello rotante. La cassaforte si apre dopo 3 sequenze esatte segnalate dall’accensione successiva di 4 led. Le sequenze di scatti sono valutate con un encoder rotativo e visualizzate con una stampa su seriale. La combinazione segreta è 4 scatti a destra, 1 giro completo a sinistra, 3 scatti a destra. All’apertura della cassaforte si accende un led. Dopo 3 tentativi sbagliati suona un allarme sotto forma di cicalino continuo.
Suggerimenti:
- per il pulsante usare modalità INPUT_PULLUP e fare un debouncer con la funzione di urutils.h waitUntilInputHigh()
- Creare due array globali: uno per memorizzare la combinazione e uno per memorizzare la sequenza inserita dall’utente.
- Implementare la funzione controllo() che confronta i due array e rerstituisce vero se sono uguali cella per cella, falso saltrimenti (usare una variabile bandierina).
https://wokwi.com/projects/392701811094769665?authuser=0
Sitografia:
- https://docs.wokwi.com/parts/wokwi-ky-040
- https://www.lombardoandrea.com/utilizzare-un-encoder-rotativo-con-arduino/