Gateway per BUS I2C (TwoWire)
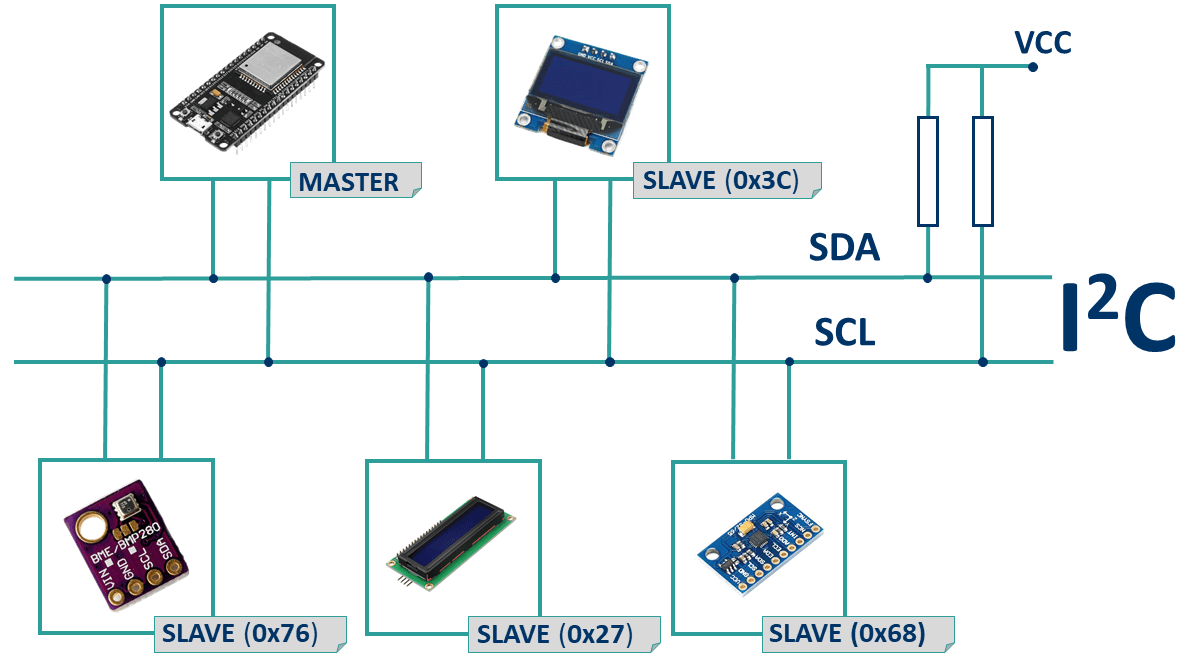
Schema di principio del BUS I2C
Notare i collegamenti in parallelo tra tutti i dispositivi attorno a 3 fili (2 fili escluso massa).
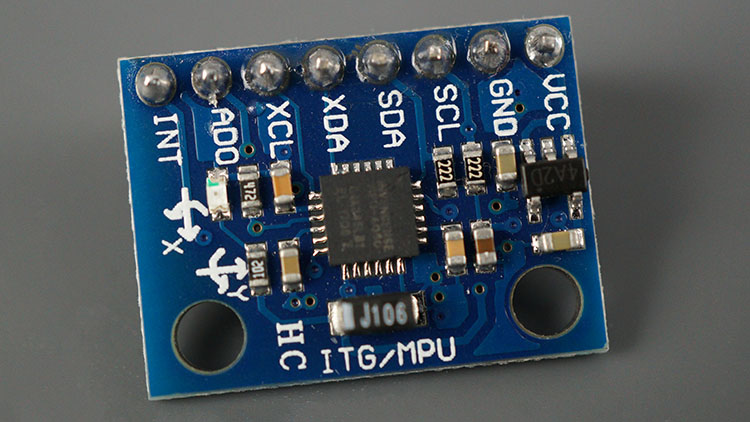
Il sensore di movimento MPU6050
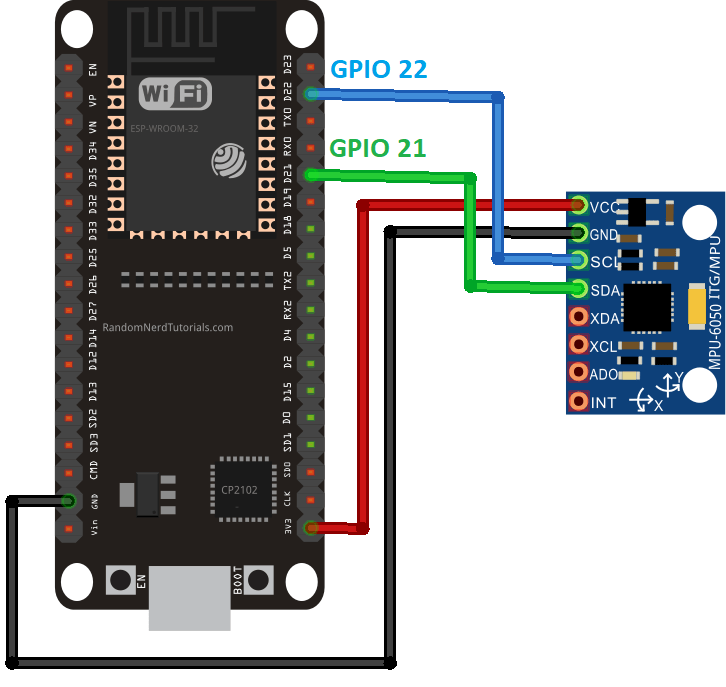
Esempio di cablaggio
Librerie del progetto
Dal punto di vista SW seve una libreria da scaricare dentro la solita cartella libraries (disponibile su Git al link https://github.com/ElectronicCats/mpu6050) :
- mpu6050-master.zip da scompattare e rinominare semplicemente mpu6050. Per installare il protocollo standard I2C e il driver del sensore MPU6050.
Gateway MPU6050-LoRaWan con modem RAK811
La libreria MQTT è asincrona per cui non bloccante. E’ adoperabile sia per ESP8266 che per ESP32.
/********************************************************
* This demo is only supported after RUI firmware version 3.0.0.13.X on RAK811
* Master Board Uart Receive buffer size at least 128 bytes.
********************************************************/
#include "RAK811.h"
#include "SoftwareSerial.h"
#include <I2Cdev.h>
#include <Wire.h>
#include <MPU6050.h>
#define WORK_MODE LoRaWAN // LoRaWAN or LoRaP2P
#define JOIN_MODE OTAA // OTAA or ABP
#if JOIN_MODE == OTAA
String DevEui = "8680000000000001";
String AppEui = "70B3D57ED00285A7";
String AppKey = "DDDFB1023885FBFF74D3A55202EDF2B1";
#else JOIN_MODE == ABP
String NwkSKey = "69AF20AEA26C01B243945A28C9172B42";
String AppSKey = "841986913ACD00BBC2BE2479D70F3228";
String DevAddr = "260125D7";
#endif
#define TXpin 11 // Set the virtual serial port pins
#define RXpin 10
//#define SensorPin A0 // used for Arduino and ESP8266
#define SensorPin 4 // used for ESP32
#define DebugSerial Serial
#define TX_INTERVAL ((uint32_t) 300)
#define RESET 15
//sensors defines
#define ONWIREPORT 10
SoftwareSerial ATSerial(RXpin,TXpin); // Declare a virtual serial port
char buffer[]= "72616B776972656C657373";
bool InitLoRaWAN(void);
RAK811 RAKLoRa(ATSerial,DebugSerial);
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 accelgyro;
int16_t ax, ay, az;
int16_t gx, gy, gz;
void set_sensor_offset() {
// use the code below to change accel/gyro offset values
Serial.println("Updating internal sensor offsets...");
// -76 -2359 1688 0 0 0
Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76
Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359
Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688
Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0
Serial.print("\n");
accelgyro.setXGyroOffset(220);
accelgyro.setYGyroOffset(76);
accelgyro.setZGyroOffset(-85);
Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76
Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359
Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688
Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0
Serial.print("\n");
}
void inline sensorsInit() {
// join I2C bus (I2Cdev library doesn't do this automatically)
Wire.begin();
// initialize device
delay(2000);
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
delay(2000);
// verify connection
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
delay(500);
//Set accel/gyro offsets
set_sensor_offset();
}
void setup() {
DebugSerial.begin(115200);
sensorsInit();
while(DebugSerial.available())
{
DebugSerial.read();
}
ATSerial.begin(9600); //set ATSerial baudrate:This baud rate has to be consistent with the baud rate of the WisNode device.
while(ATSerial.available())
{
ATSerial.read();
}
if(!RAKLoRa.rk_setWorkingMode(0)) //set WisNode work_mode to LoRaWAN.
{
DebugSerial.println(F("set work_mode failed, please reset module."));
while(1);
}
RAKLoRa.rk_getVersion(); //get RAK811 firmware version
DebugSerial.println(RAKLoRa.rk_recvData()); //print version number
DebugSerial.println(F("Start init RAK811 parameters..."));
if (!InitLoRaWAN()) //init LoRaWAN
{
DebugSerial.println(F("Init error,please reset module."));
while(1);
}
DebugSerial.println(F("Start to join LoRaWAN..."));
while(!RAKLoRa.rk_joinLoRaNetwork(60)) //Joining LoRaNetwork timeout 60s
{
DebugSerial.println();
DebugSerial.println(F("Rejoin again after 5s..."));
delay(5000);
}
DebugSerial.println(F("Join LoRaWAN success"));
if(!RAKLoRa.rk_isConfirm(0)) //set LoRa data send package type:0->unconfirm, 1->confirm
{
DebugSerial.println(F("LoRa data send package set error,please reset module."));
while(1);
}
}
bool InitLoRaWAN(void)
{
if(RAKLoRa.rk_setJoinMode(JOIN_MODE)) //set join_mode:OTAA
{
if(RAKLoRa.rk_setRegion(5)) //set region EU868
{
if (RAKLoRa.rk_initOTAA(DevEui, AppEui, AppKey))
{
DebugSerial.println(F("RAK811 init OK!"));
return true;
}
}
}
return false;
}
bool readSensorsAndTx() {
// Split both words (16 bits) into 2 bytes of 8
char payload[12];
Serial.print("Requesting data...");
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
payload[0] = highByte(ax);
payload[1] = lowByte(ax);
payload[2] = highByte(ay);
payload[3] = lowByte(ay);
payload[4] = highByte(az);
payload[5] = lowByte(az);
payload[6] = highByte(gx);
payload[7] = lowByte(gx);
payload[8] = highByte(gy);
payload[9] = lowByte(gy);
payload[10] = highByte(gz);
payload[11] = lowByte(gz);
Serial.println(F("Packet queued"));
return RAKLoRa.rk_sendData(1, payload);
}
void loop() {
DebugSerial.println(F("Start send data..."));
if (readSensorsAndTx())
{
for (unsigned long start = millis(); millis() - start < 90000L;)
{
String ret = RAKLoRa.rk_recvData();
if(ret != NULL)
{
DebugSerial.println(ret);
}
if((ret.indexOf("OK")>0)||(ret.indexOf("ERROR")>0))
{
DebugSerial.println(F("Go to Sleep."));
RAKLoRa.rk_sleep(1); //Set RAK811 enter sleep mode
delay(TX_INTERVAL * 1000); //delay 10s
RAKLoRa.rk_sleep(0); //Wakeup RAK811 from sleep mode
break;
}
}
}
}
Sitografia:
- https://randomnerdtutorials.com/esp32-mpu-6050-web-server/