Gateway per sensore resistivo di umidità del suolo
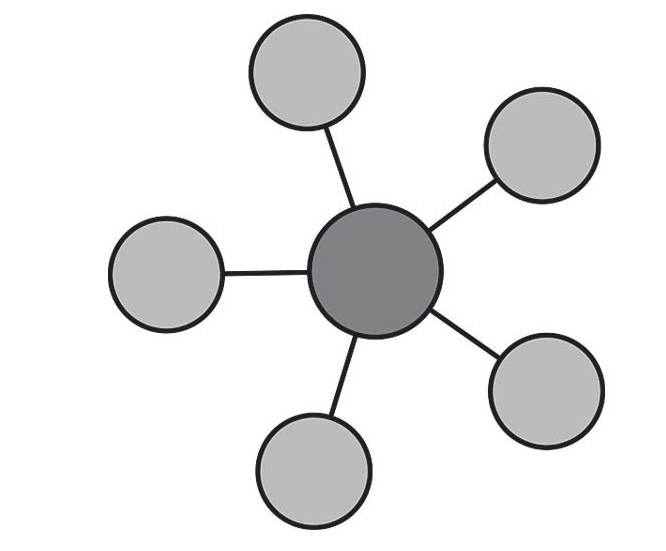
Schema di principio del collegamento a stella
Notare i collegamenti punto-punto tra tutti i dispositivi e il microcontrollore tramite linee esclusive.
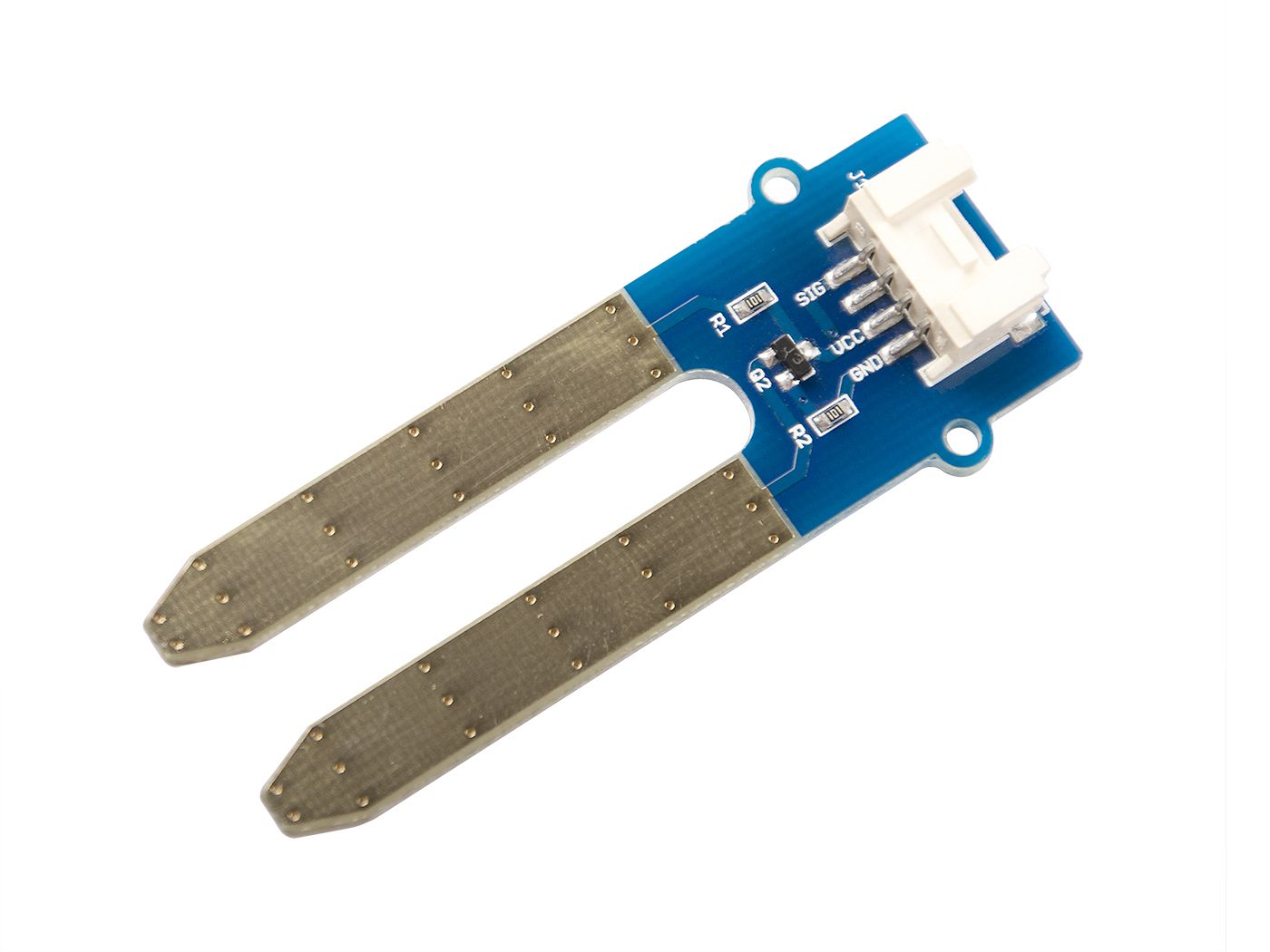
Il sensore di livello resistivo
Schema cablaggio

Condizionamento digitale
| Tensione di alimentazione | 3.3V | 5V |
|-----------------------------------------|---------|-----------|-----------|-----------|
| Umido/Secco | Umido | Secco | Umido | Secco |
| Sensore di umidità del suolo capacitivo | 2...8 | 14...21 | 821...824 | 490...549 |
| Sensore di umidità del suolo resistivo | 1024 | 483...505 | 1023 | 344...358 |
Teoricamente si può usare una qualsiasi di queste combinazioni, ma è necessario calibrare il sensore prima di dichiarare che il terreno è bagnato o asciutto.
Per il sensore di umidità del suolo capacitivo si vede anche dalla tabella che la differenza nel valore del sensore per una tensione di esercizio di 3,3V è molto bassa. Pertanto per evitare probabili errori è consigliabile, per il sensore capacitivo, utilizzare una tensione operativa di 5V.
Sensore di umidità del suolo resistivo
Il sensore resistivo di umidità del suolo è composto da 2 sonde con inserimento nel terreno. A seconda della direzione della corrente, una sonda funzionerà come catodo e l’altra come anodo. Generalmente quale sonda sia l’anodo o il catodo è irrilevante per la funzionalità del sensore, perché il sensore misura solo la resistenza ed è quindi indipendente dalla direzione del flusso di corrente.
Il circuito elettrico è chiuso sul terreno che funge da resistenza per il flusso di corrente. Questa resistenza viene misurata e dipende dalla quantità di acqua nel terreno perché l’acqua è un conduttore naturale per l’elettricità. Minore è la resistenza misurata, maggiore è la quantità di acqua nel terreno.
Il flusso di corrente attraverso l’anodo del sensore resistivo di umidità del suolo, che ha contatto con l’acqua, è un ambiente perfetto per l’elettrolisi e quindi la deposizione galvanica. Questa elettrolisi danneggia il sensore e rende il sensore impreciso. Quanto sarà forte l’elettrolisi dipende da quanto spesso e da quanta corrente viene fatta passare attraverso gli elettrodi.
Per evitare il flusso di corrente al sensore, utilizziamo un circuito MOSFET a canale N per scollegare il sensore dall’alimentazione. Inoltre leggiamo il valore del sensore solo una volta ogni tanto.
Librerie del progetto
Dal punto di vista SW non servono librerie particolari tranne quelle per la pubblicazione dei valorri traite MQTT. Una parte del codice va comunque dedicata al condizionamento dei valori misurati dal sensore per tradurli ai valori di interesse di umidità.
Gateway MQTT per la lettura di un solo sensore di umidità del suolo
Utilizziamo il pin digitale per abilitare il flusso di corrente sul gate del MOSFET. Questo chiude il circuito del sensore di umidità del suolo e leggiamo il valore del sensore analogico dopo un breve ritardo di 1 secondo. Dopo che il valore del sensore è stato stampato sul monitor seriale, aspettiamo 1 secondo e disabilitiamo il flusso di corrente attraverso il sensore tirando il Gate del MOSFET LOW.
Poiché ogni pin I/O digitale dell’ESP32, che non viene utilizzato per un’interfaccia di comunicazione, può essere un ingresso analogico, dobbiamo scegliere un pin qualsiasi come ingresso analogico.
/*
* Author: JP Meijers
* Date: 2016-10-20
*
* Transmit a one byte packet via TTN. This happens as fast as possible, while still keeping to
* the 1% duty cycle rules enforced by the RN2483's built in LoRaWAN stack. Even though this is
* allowed by the radio regulations of the 868MHz band, the fair use policy of TTN may prohibit this.
*
* CHECK THE RULES BEFORE USING THIS PROGRAM!
*
* CHANGE ADDRESS!
* Change the device address, network (session) key, and app (session) key to the values
* that are registered via the TTN dashboard.
* The appropriate line is "myLora.initABP(XXX);" or "myLora.initOTAA(XXX);"
* When using ABP, it is advised to enable "relax frame count".
*
* Connect the RN2xx3 as follows:
* RN2xx3 -- ESP8266
* Uart TX -- GPIO4
* Uart RX -- GPIO5
* Reset -- GPIO15
* Vcc -- 3.3V
* Gnd -- Gnd
*
*/
#include <rn2xx3.h>
#include <SoftwareSerial.h>
#define RESET 15
// Interval between send in seconds, so 300s = 5min
#define CONFIG_INTERVAL ((uint32_t) 300)
//sensors defines
//#define SensorPin A0 // used for Arduino and ESP8266
#define SensorPin 4 // used for ESP32
#define SENSOR_VCC_PIN 5 // used for ESP32
SoftwareSerial mySerial(4, 5); // RX, TX !! labels on relay board is swapped !!
//create an instance of the rn2xx3 library,
//giving the software UART as stream to use,
//and using LoRa WAN
rn2xx3 myLora(mySerial);
int16_t h1;
void inline sensorsInit() {
}
void inline readSensorsAndTx() {
// Split both words (16 bits) into 2 bytes of 8
byte payload[2];
Serial.print("Requesting data...");
digitalWrite(SENSOR_VCC_PIN, HIGH);
h1 = analogRead(SensorPin);
digitalWrite(SENSOR_VCC_PIN, LOW);
Serial.println("DONE");
payload[0] = highByte(h1);
payload[1] = lowByte(h1);
Serial.println(F("Packet queued"));
//myLora.tx("!"); //send String, blocking function
myLora.txBytes(payload, sizeof(payload)); // blocking function
}
// the setup routine runs once when you press reset:
void setup() {
// LED pin is GPIO2 which is the ESP8266's built in LED
pinMode(2, OUTPUT);
pinMode(SENSOR_VCC_PIN, OUTPUT);
led_on();
// Open serial communications and wait for port to open:
Serial.begin(57600);
mySerial.begin(57600);
sensorsInit();
delay(1000); //wait for the arduino ide's serial console to open
Serial.println("Startup");
initialize_radio();
//transmit a startup message
myLora.tx("TTN Mapper on ESP8266 node");
led_off();
delay(2000);
}
void initialize_radio()
{
//reset RN2xx3
pinMode(RESET, OUTPUT);
digitalWrite(RESET, LOW);
delay(100);
digitalWrite(RESET, HIGH);
delay(100); //wait for the RN2xx3's startup message
mySerial.flush();
//check communication with radio
String hweui = myLora.hweui();
while(hweui.length() != 16)
{
Serial.println("Communication with RN2xx3 unsuccessful. Power cycle the board.");
Serial.println(hweui);
delay(10000);
hweui = myLora.hweui();
}
//print out the HWEUI so that we can register it via ttnctl
Serial.println("When using OTAA, register this DevEUI: ");
Serial.println(hweui);
Serial.println("RN2xx3 firmware version:");
Serial.println(myLora.sysver());
//configure your keys and join the network
Serial.println("Trying to join TTN");
bool join_result = false;
//ABP: initABP(String addr, String AppSKey, String NwkSKey);
join_result = myLora.initABP("02017201", "8D7FFEF938589D95AAD928C2E2E7E48F", "AE17E567AECC8787F749A62F5541D522");
//OTAA: initOTAA(String AppEUI, String AppKey);
//join_result = myLora.initOTAA("70B3D57ED00001A6", "A23C96EE13804963F8C2BD6285448198");
while(!join_result)
{
Serial.println("Unable to join. Are your keys correct, and do you have TTN coverage?");
delay(60000); //delay a minute before retry
join_result = myLora.init();
}
Serial.println("Successfully joined TTN");
}
// the loop routine runs over and over again forever:
void loop() {
led_on();
readSensorsAndTx();
led_off();
delay(2000);
}
void led_on()
{
digitalWrite(2, 1);
}
void led_off()
{
digitalWrite(2, 0);
}
Gateway MQTT per la lettura periodica di un sensore di umidità del suolo alimentato a batteria
Il codice seguente utilizza la modalità di sleep profondo del microcontrollore ESP32 che consiste nello spegnimento dei due core della CPU e di tutte le periferiche fatta eccezione per un timer HW che viene impostato ad un timeout allo scadere del quale avviene il risveglio della CPU. Lo sleep profondo consente un drastico risparmio di energia nei periodi di inattività che allunga la durata di una eventuale alimentazione a batterie.
L’istruzione esp_deep_sleep_start(); avvia la fase di sleep e viene eseguita una volta sola all’interno del setup(). Il loop() è praticamente inutile e viene lasciato vuoto dato che non è possibile arrivare alla sua esecuzione.
Il risveglio fa ripartire ogni volta il sistema dal setup() per cui tutte le elaborazioni e le eventuali comunicazioni devono avvenire la dentro.
L’istruzione esp_sleep_enable_timer_wakeup(TIME_TO_SLEEP * uS_TO_S_FACTOR) imposta il timeout del timer.
La funzione print_wakeup_reason() stampa sulla seriale il motivo del wakeup.
I motivi possono essere:
- l’evento di timer HW, che sveglia il sistema in periodi di tempo prestabiliti;
- l’evento di tocco tattile di un certo pin;
- un evento di riattivazione esterna: è possibile utilizzare una riattivazione esterna o più risvegli esterni diversi;
- un evento generato dal coprocessore ULP ma questo non sarà trattato nella presente guida.
Nel codice seguente vengono effettuati alcuni tentativi di riconnessione in caso di mancato collegamento del WiFi o di mancata connessione MQTT. Fallito il numero massimo di tentativi si va in sleep profondo e si riprova al prossimo risveglio.
#include <arduino.h>
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
//#include <ttn_credentials.h>
#define TTN_APPEUI {0}
#define TTN_DEVEUI {0}
#define TTN_APPKEY {0}
#define MAX_BANDS 4
//#define CFG_LMIC_EU_like 0
bool GOTO_DEEPSLEEP = false;
// rename ttn_credentials.h.example to ttn_credentials.h and add you keys
static const u1_t PROGMEM APPEUI[8] = TTN_APPEUI;
static const u1_t PROGMEM DEVEUI[8] = TTN_DEVEUI;
static const u1_t PROGMEM APPKEY[16] = TTN_APPKEY;
void os_getArtEui(u1_t *buf) { memcpy_P(buf, APPEUI, 8); }
void os_getDevEui(u1_t *buf) { memcpy_P(buf, DEVEUI, 8); }
void os_getDevKey(u1_t *buf) { memcpy_P(buf, APPKEY, 16); }
//static uint8_t payload[5];
static osjob_t sendjob;
bool flag_TXCOMPLETE = false;
// Schedule TX every this many seconds
// Respect Fair Access Policy and Maximum Duty Cycle!
// https://www.thethingsnetwork.org/docs/lorawan/duty-cycle.html
// https://www.loratools.nl/#/airtime
const unsigned TX_INTERVAL = 30;
// payload to send to TTN gateway
// Saves the LMIC structure during DeepSleep
RTC_DATA_ATTR lmic_t RTC_LMIC;
#define PIN_LMIC_NSS 18
#define PIN_LMIC_RST 14
#define PIN_LMIC_DIO0 26
#define PIN_LMIC_DIO1 33
#define PIN_LMIC_DIO2 32
//sensors defines
//#define SensorPin A0 // used for Arduino and ESP8266
#define SensorPin 4 // used for ESP32
#define SENSOR_VCC_PIN 5 // used for ESP32
// Pin mapping
const lmic_pinmap lmic_pins = {
.nss = PIN_LMIC_NSS,
.rxtx = LMIC_UNUSED_PIN,
.rst = PIN_LMIC_RST,
.dio = {PIN_LMIC_DIO0, PIN_LMIC_DIO1, PIN_LMIC_DIO2},
};
int16_t h1;
// https://github.com/mcci-catena/arduino-lmic/blob/89c28c5888338f8fc851851bb64968f2a493462f/src/lmic/lmic.h#L233
void PrintRuntime()
{
long seconds = millis() / 1000;
Serial.print("Runtime: ");
Serial.print(seconds);
Serial.println(" seconds");
}
void PrintLMICVersion()
{
Serial.print(F("LMIC: "));
Serial.print(ARDUINO_LMIC_VERSION_GET_MAJOR(ARDUINO_LMIC_VERSION));
Serial.print(F("."));
Serial.print(ARDUINO_LMIC_VERSION_GET_MINOR(ARDUINO_LMIC_VERSION));
Serial.print(F("."));
Serial.print(ARDUINO_LMIC_VERSION_GET_PATCH(ARDUINO_LMIC_VERSION));
Serial.print(F("."));
Serial.println(ARDUINO_LMIC_VERSION_GET_LOCAL(ARDUINO_LMIC_VERSION));
}
void onEvent(ev_t ev)
{
Serial.print(os_getTime());
Serial.print(": ");
switch (ev)
{
case EV_SCAN_TIMEOUT:
Serial.println(F("EV_SCAN_TIMEOUT"));
break;
case EV_BEACON_FOUND:
Serial.println(F("EV_BEACON_FOUND"));
break;
case EV_BEACON_MISSED:
Serial.println(F("EV_BEACON_MISSED"));
break;
case EV_BEACON_TRACKED:
Serial.println(F("EV_BEACON_TRACKED"));
break;
case EV_JOINING:
Serial.println(F("EV_JOINING"));
break;
case EV_JOINED:
Serial.println(F("EV_JOINED"));
{
u4_t netid = 0;
devaddr_t devaddr = 0;
u1_t nwkKey[16];
u1_t artKey[16];
LMIC_getSessionKeys(&netid, &devaddr, nwkKey, artKey);
Serial.print("netid: ");
Serial.println(netid, DEC);
Serial.print("devaddr: ");
Serial.println(devaddr, HEX);
Serial.print("artKey: ");
for (size_t i = 0; i < sizeof(artKey); ++i)
{
Serial.print(artKey[i], HEX);
}
Serial.println("");
Serial.print("nwkKey: ");
for (size_t i = 0; i < sizeof(nwkKey); ++i)
{
Serial.print(nwkKey[i], HEX);
}
Serial.println("");
}
// Disable link check validation (automatically enabled
// during join, but because slow data rates change max TX
// size, we don't use it in this example.
LMIC_setLinkCheckMode(0);
break;
/*
|| This event is defined but not used in the code. No
|| point in wasting codespace on it.
||
|| case EV_RFU1:
|| Serial.println(F("EV_RFU1"));
|| break;
*/
case EV_JOIN_FAILED:
Serial.println(F("EV_JOIN_FAILED"));
break;
case EV_REJOIN_FAILED:
Serial.println(F("EV_REJOIN_FAILED"));
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)"));
if (LMIC.txrxFlags & TXRX_ACK)
Serial.println(F("Received ack"));
if (LMIC.dataLen)
{
Serial.print(F("Received "));
Serial.print(LMIC.dataLen);
Serial.println(F(" bytes of payload"));
}
GOTO_DEEPSLEEP = true;
break;
case EV_LOST_TSYNC:
Serial.println(F("EV_LOST_TSYNC"));
break;
case EV_RESET:
Serial.println(F("EV_RESET"));
break;
case EV_RXCOMPLETE:
// data received in ping slot
Serial.println(F("EV_RXCOMPLETE"));
break;
case EV_LINK_DEAD:
Serial.println(F("EV_LINK_DEAD"));
break;
case EV_LINK_ALIVE:
Serial.println(F("EV_LINK_ALIVE"));
break;
/*
|| This event is defined but not used in the code. No
|| point in wasting codespace on it.
||
|| case EV_SCAN_FOUND:
|| Serial.println(F("EV_SCAN_FOUND"));
|| break;
*/
case EV_TXSTART:
Serial.println(F("EV_TXSTART"));
break;
case EV_TXCANCELED:
Serial.println(F("EV_TXCANCELED"));
break;
case EV_RXSTART:
/* do not print anything -- it wrecks timing */
break;
case EV_JOIN_TXCOMPLETE:
Serial.println(F("EV_JOIN_TXCOMPLETE: no JoinAccept"));
break;
default:
Serial.print(F("Unknown event: "));
Serial.println((unsigned)ev);
break;
}
}
void do_send(osjob_t *j)
{
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND)
{
Serial.println(F("OP_TXRXPEND, not sending"));
}
else
{
// Prepare upstream data transmission at the next possible time.
byte payload[2];
Serial.print("Requesting data...");
digitalWrite(SENSOR_VCC_PIN, HIGH);
h1 = analogRead(SensorPin);
digitalWrite(SENSOR_VCC_PIN, LOW);
Serial.println("DONE");
payload[0] = highByte(h1);
payload[1] = lowByte(h1);
Serial.println(F("Packet queued"));
// prepare upstream data transmission at the next possible time.
// transmit on port 1 (the first parameter); you can use any value from 1 to 223 (others are reserved).
// don't request an ack (the last parameter, if not zero, requests an ack from the network).
// Remember, acks consume a lot of network resources; don't ask for an ack unless you really need it.
LMIC_setTxData2(1, payload, sizeof(payload)-1, 0);
Serial.println(F("Packet queued"));
}
// Next TX is scheduled after TX_COMPLETE event.
}
void SaveLMICToRTC(int deepsleep_sec)
{
Serial.println(F("Save LMIC to RTC"));
RTC_LMIC = LMIC;
// ESP32 can't track millis during DeepSleep and no option to advanced millis after DeepSleep.
// Therefore reset DutyCyles
unsigned long now = millis();
// EU Like Bands
#if defined(CFG_LMIC_EU_like2)//era CFG_LMIC_EU_like ma non funziona
Serial.println(F("Reset CFG_LMIC_EU_like band avail"));
for (int i = 0; i < MAX_BANDS; i++)
{
ostime_t correctedAvail = RTC_LMIC.bands[i].avail - ((now / 1000.0 + deepsleep_sec) * OSTICKS_PER_SEC);
if (correctedAvail < 0)
{
correctedAvail = 0;
}
RTC_LMIC.bands[i].avail = correctedAvail;
}
RTC_LMIC.globalDutyAvail = RTC_LMIC.globalDutyAvail - ((now / 1000.0 + deepsleep_sec) * OSTICKS_PER_SEC);
if (RTC_LMIC.globalDutyAvail < 0)
{
RTC_LMIC.globalDutyAvail = 0;
}
#else
Serial.println(F("No DutyCycle recalculation function!"));
#endif
}
void LoadLMICFromRTC()
{
Serial.println(F("Load LMIC from RTC"));
LMIC = RTC_LMIC;
}
void GoDeepSleep()
{
Serial.println(F("Go DeepSleep"));
PrintRuntime();
Serial.flush();
esp_sleep_enable_timer_wakeup(TX_INTERVAL * 1000000);
esp_deep_sleep_start();
}
void setup()
{
Serial.begin(115200);
pinMode(SENSOR_VCC_PIN, OUTPUT);
Serial.println(F("Starting DeepSleep test"));
PrintLMICVersion();
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
if (RTC_LMIC.seqnoUp != 0)
{
LoadLMICFromRTC();
}
// Start job (sending automatically starts OTAA too)
do_send(&sendjob);
}
void loop()
{
static unsigned long lastPrintTime = 0;
os_runloop_once();
const bool timeCriticalJobs = os_queryTimeCriticalJobs(ms2osticksRound((TX_INTERVAL * 1000)));
if (!timeCriticalJobs && GOTO_DEEPSLEEP == true && !(LMIC.opmode & OP_TXRXPEND))
{
Serial.print(F("Can go sleep "));
SaveLMICToRTC(TX_INTERVAL);
GoDeepSleep();
}
else if (millis() - lastPrintTime > 2000)
{
Serial.print(F("Cannot sleep "));
Serial.print(F("TimeCriticalJobs: "));
Serial.print(timeCriticalJobs);
Serial.print(" ");
PrintRuntime();
lastPrintTime = millis();
}
}
Sitografia:
- https://diyi0t.com/soil-moisture-sensor-tutorial-for-arduino-and-esp8266
- https://randomnerdtutorials.com/esp32-deep-sleep-arduino-ide-wake-up-sources/
- https://randomnerdtutorials.com/esp32-timer-wake-up-deep-sleep/