Gateway per BUS I2C (TwoWire)
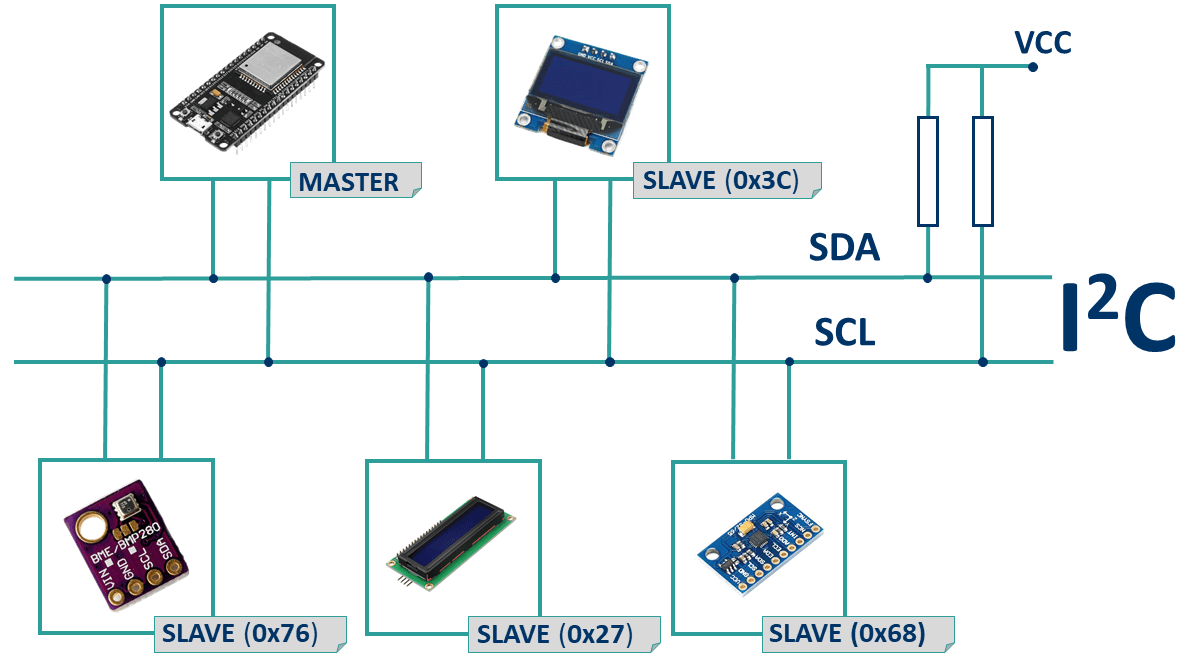
Schema di principio del BUS I2C
Notare i collegamenti in parallelo tra tutti i dispositivi attorno a 3 fili (2 fili escluso massa).
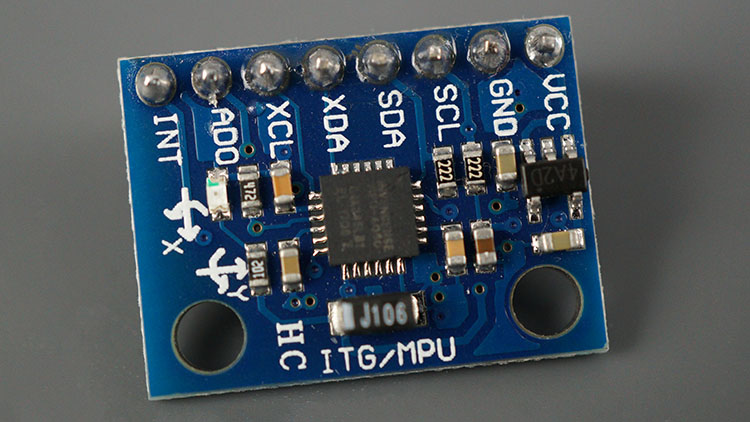
Il sensore di movimento MPU6050
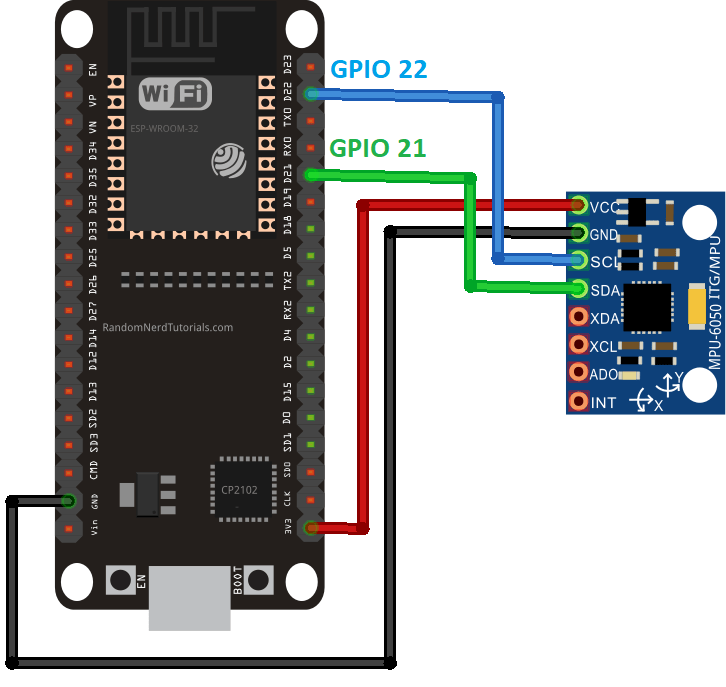
Esempio di cablaggio
Librerie del progetto
Dal punto di vista SW seve una libreria da scaricare dentro la solita cartella libraries (disponibile su Git al link https://github.com/ElectronicCats/mpu6050) :
- mpu6050-master.zip da scompattare e rinominare semplicemente mpu6050. Per installare il protocollo standard I2C e il driver del sensore MPU6050.
Gateway MPU6050-LoRaWan con modem RN2483
La libreria MQTT è asincrona per cui non bloccante. E’ adoperabile sia per ESP8266 che per ESP32.
/*
* Author: JP Meijers
* Date: 2016-10-20
*
* Transmit a one byte packet via TTN. This happens as fast as possible, while still keeping to
* the 1% duty cycle rules enforced by the RN2483's built in LoRaWAN stack. Even though this is
* allowed by the radio regulations of the 868MHz band, the fair use policy of TTN may prohibit this.
*
* CHECK THE RULES BEFORE USING THIS PROGRAM!
*
* CHANGE ADDRESS!
* Change the device address, network (session) key, and app (session) key to the values
* that are registered via the TTN dashboard.
* The appropriate line is "myLora.initABP(XXX);" or "myLora.initOTAA(XXX);"
* When using ABP, it is advised to enable "relax frame count".
*
* Connect the RN2xx3 as follows:
* RN2xx3 -- ESP8266
* Uart TX -- GPIO4
* Uart RX -- GPIO5
* Reset -- GPIO15
* Vcc -- 3.3V
* Gnd -- Gnd
*
*/
#include <rn2xx3.h>
#include <SoftwareSerial.h>
#include <I2Cdev.h>
#include <Wire.h>
#include <MPU6050.h>
#define RESET 15
//sensors defines
SoftwareSerial mySerial(4, 5); // RX, TX !! labels on relay board is swapped !!
//create an instance of the rn2xx3 library,
//giving the software UART as stream to use,
//and using LoRa WAN
rn2xx3 myLora(mySerial);
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 accelgyro;
int16_t ax, ay, az;
int16_t gx, gy, gz;
void set_sensor_offset() {
// use the code below to change accel/gyro offset values
Serial.println("Updating internal sensor offsets...");
// -76 -2359 1688 0 0 0
Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76
Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359
Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688
Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0
Serial.print("\n");
accelgyro.setXGyroOffset(220);
accelgyro.setYGyroOffset(76);
accelgyro.setZGyroOffset(-85);
Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76
Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359
Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688
Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0
Serial.print("\n");
}
void inline sensorsInit() {
// join I2C bus (I2Cdev library doesn't do this automatically)
Wire.begin();
// initialize device
delay(2000);
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
delay(2000);
// verify connection
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
delay(500);
//Set accel/gyro offsets
set_sensor_offset();
}
void inline readSensorsAndTx() {
// Split both words (16 bits) into 2 bytes of 8
byte payload[12];
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
payload[0] = highByte(ax);
payload[1] = lowByte(ax);
payload[2] = highByte(ay);
payload[3] = lowByte(ay);
payload[4] = highByte(az);
payload[5] = lowByte(az);
payload[6] = highByte(gx);
payload[7] = lowByte(gx);
payload[8] = highByte(gy);
payload[9] = lowByte(gy);
payload[10] = highByte(gz);
payload[11] = lowByte(gz);
//myLora.tx("!"); //send String, blocking function
myLora.txBytes(payload, sizeof(payload)); // blocking function
}
// the setup routine runs once when you press reset:
void setup() {
// LED pin is GPIO2 which is the ESP8266's built in LED
pinMode(2, OUTPUT);
led_on();
// Open serial communications and wait for port to open:
Serial.begin(57600);
mySerial.begin(57600);
sensorsInit();
delay(1000); //wait for the arduino ide's serial console to open
Serial.println("Startup");
initialize_radio();
//transmit a startup message
myLora.tx("TTN Mapper on ESP8266 node");
led_off();
delay(2000);
}
void initialize_radio()
{
//reset RN2xx3
pinMode(RESET, OUTPUT);
digitalWrite(RESET, LOW);
delay(100);
digitalWrite(RESET, HIGH);
delay(100); //wait for the RN2xx3's startup message
mySerial.flush();
//check communication with radio
String hweui = myLora.hweui();
while(hweui.length() != 16)
{
Serial.println("Communication with RN2xx3 unsuccessful. Power cycle the board.");
Serial.println(hweui);
delay(10000);
hweui = myLora.hweui();
}
//print out the HWEUI so that we can register it via ttnctl
Serial.println("When using OTAA, register this DevEUI: ");
Serial.println(hweui);
Serial.println("RN2xx3 firmware version:");
Serial.println(myLora.sysver());
//configure your keys and join the network
Serial.println("Trying to join TTN");
bool join_result = false;
//ABP: initABP(String addr, String AppSKey, String NwkSKey);
join_result = myLora.initABP("02017201", "8D7FFEF938589D95AAD928C2E2E7E48F", "AE17E567AECC8787F749A62F5541D522");
//OTAA: initOTAA(String AppEUI, String AppKey);
//join_result = myLora.initOTAA("70B3D57ED00001A6", "A23C96EE13804963F8C2BD6285448198");
while(!join_result)
{
Serial.println("Unable to join. Are your keys correct, and do you have TTN coverage?");
delay(60000); //delay a minute before retry
join_result = myLora.init();
}
Serial.println("Successfully joined TTN");
}
// the loop routine runs over and over again forever:
void loop() {
led_on();
readSensorsAndTx();
led_off();
delay(200);
}
void led_on()
{
digitalWrite(2, 1);
}
void led_off()
{
digitalWrite(2, 0);
}
Sitografia:
- https://randomnerdtutorials.com/esp32-mpu-6050-web-server/