Gateway per BUS I2C (TwoWire)
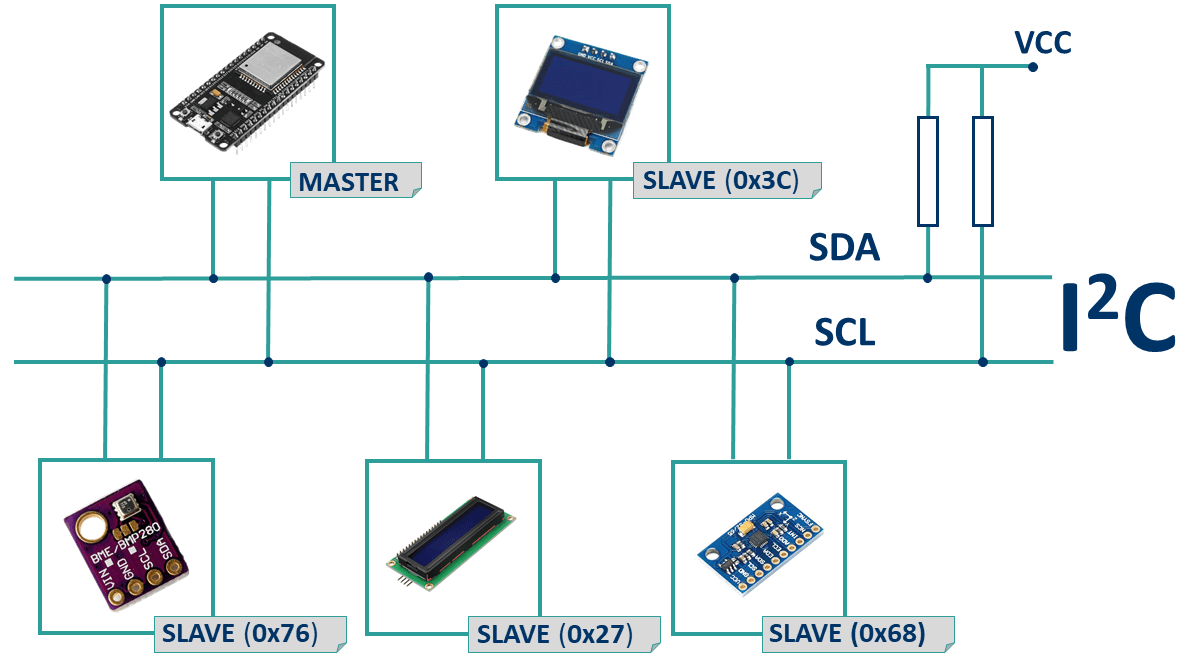
Schema di principio del BUS I2C
Notare i collegamenti in parallelo tra tutti i dispositivi attorno a 3 fili (2 fili escluso massa).
Il sensore di movimento MPU6050
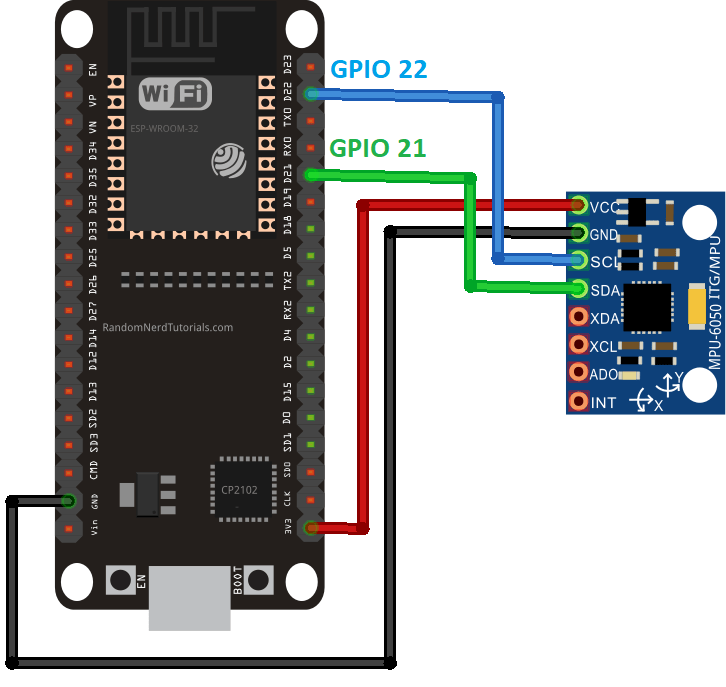
Esempio di cablaggio
Librerie del progetto
Dal punto di vista SW seve una libreria da scaricare dentro la solita cartella libraries (disponibile su Git al link https://github.com/ElectronicCats/mpu6050) :
- mpu6050-master.zip da scompattare e rinominare semplicemente mpu6050. Per installare il protocollo standard I2C e il driver del sensore MPU6050.
Gateway MPU6050-LoRaWan con modem RN2483
La libreria MQTT è asincrona per cui non bloccante. E’ adoperabile sia per ESP8266 che per ESP32.
/*******************************************************************************
* Copyright (c) 2015 Thomas Telkamp and Matthijs Kooijman
* Copyright (c) 2018 Terry Moore, MCCI
*
* Permission is hereby granted, free of charge, to anyone
* obtaining a copy of this document and accompanying files,
* to do whatever they want with them without any restriction,
* including, but not limited to, copying, modification and redistribution.
* NO WARRANTY OF ANY KIND IS PROVIDED.
*
* This example sends a valid LoRaWAN packet with payload "Hello,
* world!", using frequency and encryption settings matching those of
* the The Things Network.
*
* This uses OTAA (Over-the-air activation), where where a DevEUI and
* application key is configured, which are used in an over-the-air
* activation procedure where a DevAddr and session keys are
* assigned/generated for use with all further communication.
*
* Note: LoRaWAN per sub-band duty-cycle limitation is enforced (1% in
* g1, 0.1% in g2), but not the TTN fair usage policy (which is probably
* violated by this sketch when left running for longer)!
* To use this sketch, first register your application and device with
* the things network, to set or generate an AppEUI, DevEUI and AppKey.
* Multiple devices can use the same AppEUI, but each device has its own
* DevEUI and AppKey.
*
* Do not forget to define the radio type correctly in
* arduino-lmic/project_config/lmic_project_config.h or from your BOARDS.txt.
*
*******************************************************************************/
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
// include the MPU6050 Sensor Library
#include <I2Cdev.h>
#include <Wire.h>
#include <MPU6050.h>
//
// For normal use, we require that you edit the sketch to replace FILLMEIN
// with values assigned by the TTN console. However, for regression tests,
// we want to be able to compile these scripts. The regression tests define
// COMPILE_REGRESSION_TEST, and in that case we define FILLMEIN to a non-
// working but innocuous value.
//
#define FILLMEIN 1
/*
#ifdef COMPILE_REGRESSION_TEST
#define FILLMEIN 0
#else
#warning "You must replace the values marked FILLMEIN with real values from the TTN control panel!"
#define FILLMEIN (#dont edit this, edit the lines that use FILLMEIN)
#endif
*/
// This EUI must be in little-endian format, so least-significant-byte
// first. When copying an EUI from ttnctl output, this means to reverse
// the bytes. For TTN issued EUIs the last bytes should be 0xD5, 0xB3,
// 0x70.
static const u1_t PROGMEM APPEUI[8]={ FILLMEIN };
void os_getArtEui (u1_t* buf) { memcpy_P(buf, APPEUI, 8);}
// This should also be in little endian format, see above.
static const u1_t PROGMEM DEVEUI[8]={ FILLMEIN };
void os_getDevEui (u1_t* buf) { memcpy_P(buf, DEVEUI, 8);}
// This key should be in big endian format (or, since it is not really a
// number but a block of memory, endianness does not really apply). In
// practice, a key taken from ttnctl can be copied as-is.
static const u1_t PROGMEM APPKEY[16] = { FILLMEIN };
void os_getDevKey (u1_t* buf) { memcpy_P(buf, APPKEY, 16);}
// payload to send to TTN gateway
static uint8_t payload[5];
static osjob_t sendjob;
bool flag_TXCOMPLETE = false;
// Schedule TX every this many seconds (might become longer due to duty
// cycle limitations).
const unsigned TX_INTERVAL = 60;
// Pin mapping
const lmic_pinmap lmic_pins = {
.nss = 6,
.rxtx = LMIC_UNUSED_PIN,
.rst = 5,
.dio = {2, 3, 4},
};
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 accelgyro;
int16_t ax, ay, az;
int16_t gx, gy, gz;
void set_sensor_offset() {
// use the code below to change accel/gyro offset values
Serial.println("Updating internal sensor offsets...");
// -76 -2359 1688 0 0 0
Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76
Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359
Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688
Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0
Serial.print("\n");
accelgyro.setXGyroOffset(220);
accelgyro.setYGyroOffset(76);
accelgyro.setZGyroOffset(-85);
Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76
Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359
Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688
Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0
Serial.print("\n");
}
void printHex2(unsigned v) {
v &= 0xff;
if (v < 16)
Serial.print('0');
Serial.print(v, HEX);
}
void onEvent (ev_t ev) {
Serial.print(os_getTime());
Serial.print(": ");
switch(ev) {
case EV_JOINED:
Serial.println(F("EV_JOINED"));
{
u4_t netid = 0;
devaddr_t devaddr = 0;
u1_t nwkKey[16];
u1_t artKey[16];
LMIC_getSessionKeys(&netid, &devaddr, nwkKey, artKey);
Serial.print("netid: ");
Serial.println(netid, DEC);
Serial.print("devaddr: ");
Serial.println(devaddr, HEX);
Serial.print("AppSKey: ");
for (size_t i=0; i<sizeof(artKey); ++i) {
if (i != 0)
Serial.print("-");
printHex2(artKey[i]);
}
Serial.println("");
Serial.print("NwkSKey: ");
for (size_t i=0; i<sizeof(nwkKey); ++i) {
if (i != 0)
Serial.print("-");
printHex2(nwkKey[i]);
}
Serial.println();
}
// Disable link check validation (automatically enabled
// during join, but because slow data rates change max TX
// size, we don't use it in this example.
LMIC_setLinkCheckMode(0);
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)"));
if (LMIC.txrxFlags & TXRX_ACK)
Serial.println(F("Received ack"));
if (LMIC.dataLen) {
Serial.print(F("Received "));
Serial.print(LMIC.dataLen);
Serial.println(F(" bytes of payload"));
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send);
flag_TXCOMPLETE = true;
break;
case EV_LINK_DEAD:
initLoRaWAN();
break;
default:
Serial.print(F("Unknown event: "));
Serial.println((unsigned) ev);
break;
}
}
void do_send(osjob_t* j){
// Split both words (16 bits) into 2 bytes of 8
byte payload[12];
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
payload[0] = highByte(ax);
payload[1] = lowByte(ax);
payload[2] = highByte(ay);
payload[3] = lowByte(ay);
payload[4] = highByte(az);
payload[5] = lowByte(az);
payload[6] = highByte(gx);
payload[7] = lowByte(gx);
payload[8] = highByte(gy);
payload[9] = lowByte(gy);
payload[10] = highByte(gz);
payload[11] = lowByte(gz);
LMIC_setTxData2(1, payload, sizeof(payload)-1, 0);
Serial.println(F("Packet queued"));
}
void initLoRaWAN() {
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
// by joining the network, precomputed session parameters are be provided.
//LMIC_setSession(0x1, DevAddr, (uint8_t*)NwkSkey, (uint8_t*)AppSkey);
// Enabled data rate adaptation
LMIC_setAdrMode(1);
// Enable link check validation
LMIC_setLinkCheckMode(0);
// Set data rate and transmit power
LMIC_setDrTxpow(DR_SF7, 21);
}
void sensorInit(){
// join I2C bus (I2Cdev library doesn't do this automatically)
Wire.begin();
// initialize device
delay(2000);
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
delay(2000);
// verify connection
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
delay(500);
//Set accel/gyro offsets
set_sensor_offset();
}
void setup() {
Serial.begin(9600);
Serial.println(F("Starting"));
#ifdef VCC_ENABLE
// For Pinoccio Scout boards
pinMode(VCC_ENABLE, OUTPUT);
digitalWrite(VCC_ENABLE, HIGH);
delay(1000);
#endif
// Setup LoRaWAN state
initLoRaWAN();
sensorInit();
// Start job (sending automatically starts OTAA too)
do_send(&sendjob);
}
void loop() {
os_runloop_once();
/* In caso di instabilità
//Run LMIC loop until he as finish
while(flag_TXCOMPLETE == false)
{
os_runloop_once();
}
flag_TXCOMPLETE = false;
*/
}
Sitografia:
- https://randomnerdtutorials.com/esp32-mpu-6050-web-server/