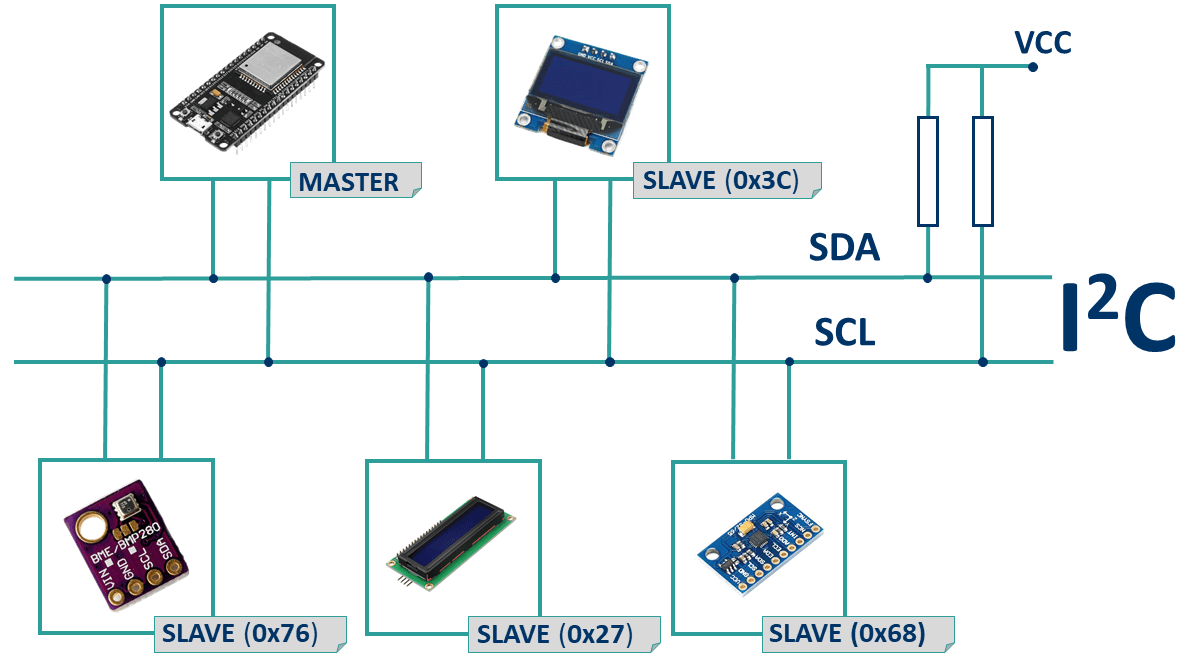
Gateway per BUS I2C (TwoWire)
Schema di principio del BUS I2C
Notare i collegamenti in parallelo tra tutti i dispositivi attorno a 3 fili (2 fili escluso massa).
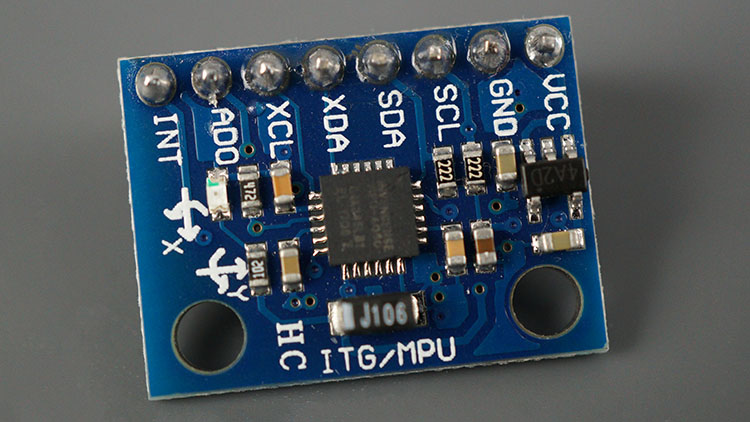
Il sensore di movimento MPU6050
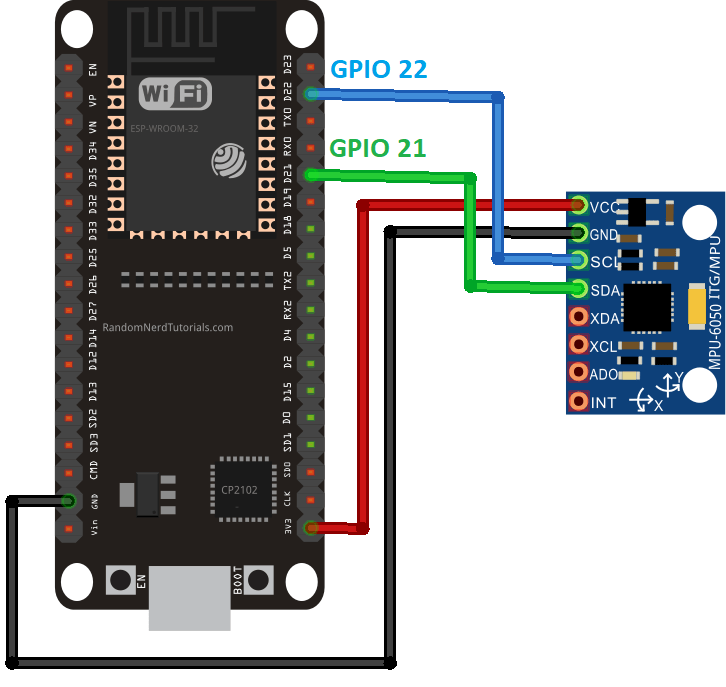
Esempio di cablaggio
Librerie del progetto
Dal punto di vista SW seve una libreria da scaricare dentro la solita cartella libraries (disponibile su Git al link https://github.com/ElectronicCats/mpu6050) :
- mpu6050-master.zip da scompattare e rinominare semplicemente mpu6050. Per installare il protocollo standard I2C e il driver del sensore MPU6050.
Gateway I2C-MQTT per la lettura di un solo sensore
La libreria MQTT è asincrona per cui non bloccante. E’ adoperabile sia per ESP8266 che per ESP32.
//#include <WiFiClientSecure.h>
#include <WiFi.h> // per ESP32
//#include <ESP8266WiFi.h> per ESP8266
#include <AsyncMqttClient.h>
#include <Ticker.h>
#include <I2Cdev.h>
#include <Wire.h>
#include <MPU6050.h>
// Raspberry Pi Mosquitto MQTT Broker
//#define MQTT_HOST IPAddress(192, 168, 1, 254)
#define MQTT_HOST "test.mosquitto.org"
// For a cloud MQTT broker, type the domain name
//#define MQTT_HOST "example.com"
#define MQTT_PORT 1883
#define WIFI_SSID "myssid"
#define WIFI_PASSWORD "mypsw"
//Temperature MQTT Topic
#define MQTT_PUB "esp/mpu6050/"
Ticker mqttReconnectTimer;
Ticker wifiReconnectTimer;
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 accelgyro;
//MPU6050 accelgyro(0x69); // <-- use for AD0 high
int16_t ax, ay, az;
int16_t gx, gy, gz;
String datastr = "";
AsyncMqttClient mqttClient;
unsigned long previousMillis = 0; // Stores last time temperature was published
const long interval = 4000; // Interval at which to publish sensor readings
byte count = 0;
void connectToWifi() {
Serial.println("Connecting to Wi-Fi...");
WiFi.mode(WIFI_STA);
//WiFi.disconnect();
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
}
void connectToMqtt() {
Serial.println("Connecting to MQTT...");
mqttClient.connect();
}
void WiFiEvent(WiFiEvent_t event) {
Serial.printf("[WiFi-event] event: %d\n", event);
switch(event) {
case SYSTEM_EVENT_STA_GOT_IP:
Serial.println("WiFi connected");
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
connectToMqtt();
break;
case SYSTEM_EVENT_STA_DISCONNECTED:
Serial.println("WiFi lost connection");
mqttReconnectTimer.detach(); // ensure we don't reconnect to MQTT while reconnecting to Wi-Fi
wifiReconnectTimer.once_ms(2000, connectToWifi);
break;
}
}
void onMqttConnect(bool sessionPresent) {
Serial.println("Connected to MQTT.");
Serial.print("Session present: ");
Serial.println(sessionPresent);
}
void onMqttDisconnect(AsyncMqttClientDisconnectReason reason) {
Serial.println("Disconnected from MQTT.");
if (WiFi.isConnected()) {
mqttReconnectTimer.once_ms(2000, connectToMqtt);
}
}
void onMqttPublish(uint16_t packetId) {
Serial.println("Publish acknowledged.");
Serial.print(" packetId: ");
Serial.println(packetId);
}
void set_sensor_offset() {
// use the code below to change accel/gyro offset values
Serial.println("Updating internal sensor offsets...");
// -76 -2359 1688 0 0 0
Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76
Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359
Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688
Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0
Serial.print("\n");
accelgyro.setXGyroOffset(220);
accelgyro.setYGyroOffset(76);
accelgyro.setZGyroOffset(-85);
Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76
Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359
Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688
Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0
Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0
Serial.print("\n");
}
void busInit(){
// join I2C bus (I2Cdev library doesn't do this automatically)
Wire.begin();
// initialize device
delay(2000);
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
delay(2000);
// verify connection
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
delay(500);
//Set accel/gyro offsets
set_sensor_offset();
}
void setup() {
// Start the DS18B20 sensor
Serial.begin(115200);
Serial.println();
Serial.println();
WiFi.onEvent(WiFiEvent);
mqttClient.onConnect(onMqttConnect);
mqttClient.onDisconnect(onMqttDisconnect);
mqttClient.onPublish(onMqttPublish);
mqttClient.setServer(MQTT_HOST, MQTT_PORT);
// If your broker requires authentication (username and password), set them below
//mqttClient.setCredentials("REPlACE_WITH_YOUR_USER", "REPLACE_WITH_YOUR_PASSWORD");
connectToWifi();
count = 0;
while (WiFi.status() != WL_CONNECTED && count < 10) {
delay(500);
count++;
Serial.print(".");
}
busInit();
}
void readData(String &str){
// read raw accel/gyro measurements from device
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// these methods (and a few others) are also available
//accelgyro.getAcceleration(&ax, &ay, &az);
//accelgyro.getRotation(&gx, &gy, &gz);
str = "{\"XAcc\":\"";
str += ax;
str += "\",\"YAcc\":\"";
str += ay;
str += "\",\"ZAcc\":\"";
str += az;
str += "\",\"XGyro\":\"";
str += gx;
str += "\",\"YGyro\":\"";
str += gy;
str += "\",\"ZGyro\":\"";
str += gz;
str += "\"}";
//delay(500);
}
void loop() {
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis;
Serial.print("Requesting data...");
readData(datastr);
Serial.println("DONE");
// Publish an MQTT message on topic esp32/ds18b20/temperature
uint16_t packetIdPub1 = mqttClient.publish(MQTT_PUB, 1, true, datastr.c_str(), datastr.length());
Serial.print("Pubblicato sul topic %s at QoS 1, packetId: ");
Serial.println(MQTT_PUB);
Serial.println(packetIdPub1);
Serial.print("Messaggio inviato: ");
Serial.println(datastr);
}
}
Sitografia:
- https://randomnerdtutorials.com/esp32-mpu-6050-web-server/