Mezzi a BUS
Un mezzo trasmissivo si dice a BUS (o brodcast) quando più periferiche condividono lo stesso collegamento. Si può realizzare sia con un un unico filo in rame che collega tutti i dispositivi, che con un mezzo radio su cui tutti i dispositivi condividono lo stessa frequenza (canale) di trasmissione.
I mezzi a BUS posseggono la proprietà che se un interlocutore parla tutti gli altri ascoltano perchè un messaggio inviato da uno passa comunque per tutti gli altri.
Collisioni
I mezzi a BUS sono afflitti dal fenomeno delle collisioni.
Una collisione è l’evento di sovrapposizione distruttiva di due o più messaggi su un canale. E’ un evento irreversibile perchè non permette il recupero dell’informazione trasportata originariamente dai singoli messaggi.
Una collisione su un mezzo a BUS accade quando due o più interlocutori parlano contemporaneamente.
Nascono adesso due problemi:
- rilevare una collisione
- evitare una collisione.
Per rilevare le collisioni ci sono tecniche dirette come l’ascolto del canale e indirette come la mancata ricezione di un messaggio di conferma.
Per evitare le collisioni servono i protocolli di arbitraggio che sostanzialmente cercano di far parlare gli interlocutori sempre uno alla volta. I protocolli di arbitraggio si dividono in master/slave (o centralizzati) e in peer to peer (o distribuiti).
I mezzi a BUS sono bidirezionali, nel senso che la comunicazione può avvenire nelle due direzioni possibili tra coppie di stazioni, ma solo in modalità half duplex, cioè si trasmette sempre una stazione alla volta, anche quando a parlare sono solo in due. Stazioni diverse parlano sempre in momenti differenti, regolati dal protocollo di arbitraggio.
Protocolli di arbitraggio
Nei protocolli di arbitraggio master slave esiste una stazione centrale di livello gerarchico superiore detta master che, per conto delle stazioni slave, decide chi deve parlare e quando deve parlare evitando sovrapposizioni nel tempo dei messaggi. Questo tipo di politica è adatta alle trasmissioni sincrone da parte di sorgenti regolari di dati, quali i sensori.
Nei protocolli di arbitraggio peer to peer, o distribuiti, le stazioni sono tutte di pari livello e sono programmate per interpretare continuamente la situazione del canale in modo da parlare sempre una alla volta. Qesto tipo di politica è adatta alle trasmissioni asincrone da parte di sorgenti intermittenti di dati, quali comandi, allarmi, ecc.
I protocolli di arbitraggio distribuiti si dividono ulteriormente in deterministici e in a contesa.
Quelli deterministici eliminano alla radice la possibilità di collisioni realizzando un meccanismo di cooperazione tra le stazioni tramite messaggi di controllo con cui esse comunicano sia l’intenzione di trasmettere che il diritto di accesso al canale. Il diritto si acquisisce o si cede mediante il trasferimento di una informazione particolare detta token. Il token può essere posseduto quando si ha la necessità di trasmettere, ma solo da una stazione alla volta, e deve essere immediatamente ceduto ad un’altra stazione quando la stazione che lo deteneva ha finito di trasmettere.
Quelli statistici o a contesa realizzano una competizione per l’accesso al mezzo che deve essere regolata dalle singole stazioni semplicemente osservando il canale in maniera indipendente (autonoma) l’una dall’altra, senza coordinamento alcuno. Questa categoria di protocolli limitano statisticamente il problema delle collisioni ma non lo annullano completamente, per cui le collisioni necessitano ancora di essere rilevate dalle singole stazioni.
Come rilevare una collisione
Si ricorre di base ad un meccanismo di rilevazione indiretta di una collisione sul canale mediante l’utilizzo di un protocollo di trasmissione confermato.
I protocolli confermati sono protocolli in cui il mittente possiede un timer, detto timer di ritrasmissione, impostato ad un valore massimo di conteggio detto timeout:
- Il timer viene avviato al momento esatto dell’invio di un messaggio e viene resettato al momento della ricezione di un messaggio di conferma di corretto arrivo a destinazione.
- Il messaggio di conferma viene detto ack (acknowledgement) ed è un messaggio di controllo (non dati) che viene inviato dal ricevente in direzione del mittente. Un ack è sempre inviato dal ricevente di un precedente messaggio, mai dal mittente di quel messaggio.
- Se il timer di trasmissione è resettato prima dello scadere del timeout la trasmissione è considerata avvenuta con successo. Se invece allo scadere del timeout ancora non si ricevono ack allora il messaggio viene dato per perso ed è, dal mittente, ritrasmesso.
Questo è lo scenario che daremo per scontato nel seguito ma spesso accade che le collisioni non vengano affatto rilevate perchè ritenuto poco vantaggioso.
- Una situazione comune è l’interrogazione periodica dei sensori con dispositivi a basso costo che utilizzano un mezzo radio molto affollato. In questo caso l’utilizzo di un ack appesantisce dispositivi che devono rimanere semplici e incrementa inutilmente il traffico in rete dato che al polling successivo il dato verrà comunque ritrasmesso.
- nel caso dei dispositivi sensori con funzioni di comando o configurazione, ad esempio pulsanti, rilevatori di transito, allarmi in cui l’invio del messaggiò avviene una tantum in maniera del tutto asincrona (cioè non prevedibile dal ricevitore), potrebbe essere auspicabile un feedback del protocollo mediante un meccanismo di conferma basato sui messaggi di ack.
Come reagire a fronte di una collisione?
Se tutte le stazioni ritrasmettono nello stesso istante collidono immediatamente e il messaggio viene perso.
Soluzione: Backoff
- È un tempo di ritardo casuale che una stazione deve attendere dal momento che ha preso la decisione di trasmettere
- È calcolato in maniera indipendente, l’una dall’altra, da tutte le stazioni
- Serve a determinare la stazione che deve trasmettere per prima minimizzando il rischio di trasmissioni contemporanee
- È calcolato all’interno di un intervallo detto finestra di contesa
ALOHA
E’ il protocollo peer to peer per certi versi peggiore, infatti è quello con la probabilità di collisione più alta ma è anche quello con l’implementazione più semplice. E’ adatto per la trasmissione di messaggi brevi ed è appropriato per dispostivi con ridotta capacità di calcolo e con esigenze di basso consumo energetico.
Fasi ALOHA
Una stazione trasmittente:
- al momento che ha una trama pronta, la invia sul canale senza aspettare.
- Dopo l’invio aspetta per un certo tempo lo scadere (TIMEOUT) di un timer (detto timer di trasmissione):
- Se essa riceve il messaggio di ack allora la trasmissione è avvenuta con successo e i punti successivi al corrente non vengono eseguiti.
- Altrimenti la stazione usa una strategia di backoff, cioè genera un tempo casuale e attende per questo tempo
- Scaduto il backoff, la stazione ritrasmette lo stesso messaggio ripartendo dal punto 1.
- Dopo molte volte che non si ricevono conferme (acknowledgement) allora la stazione abbandona l’idea di trasmettere (il canale è guasto).
Le collisioni graficamente:
 Fig 1
Fig 1
Protocollo ALOHA in trasmissione pseudocodice:
N=1;
while(N <= max){
send(data_frame);
waitUntil(ackOrTimeout());
if(ack_received){
exit while;
}else{
/* timeout scaduto: ritrasmissione*/
t=random();
wait(t);
N=N+1;
}
/* troppi tentativi: rinuncio a trasmette
Protocollo ALOHA in ricezione pseudocodice:
While(true){
WaitUntil(dataFrameArrived());
if(!duplicate()){
deliver(frame)
}
send(ack_frame);
}
 Fig 2
Fig 2
CSMA
Fasi CSMA
Significa Carrier Sensing Multiple Access cioè protocollo di Accesso Multiplo con Ascolto della Portante (prima della trasmissione). E’ una miglioria sostanziale dell’Aloha perchè implementa l’ascolto del canale prima della trasmissione, detto anche LBT (Listen before Talk) o accesso polite, che riduce drasticamente la probabilità di collisione del messaggio appena trasmesso sul canale, a prezzo di una implementazione più complessa. E’ adatto per la trasmissione di messaggi più lunghi ed è appropriato per dispostivi con migliore capacità di calcolo e quando si è in assenza di problemi di consumo energetico.
Ascolto della Portante può essere considerato il misurare una quantità di energia sul canale significativamente maggiore di quella che c’è normalmente su un canale a riposo (idle). Ciò può essere rilevato mediante un dispositivo a soglia che scatti oltre un certo valore di riferimento. Si tratta di una rilevazione diretta di canale occupato.
Una stazione trasmittente:
- al momento che ha una trama pronta, aspetta finchè non “sente” il canale libero (cioè nessuno trasmette).
- Appena la stazione rileva il canale libero invia immediatamente la trama.
- Dopo l’invio aspetta per un certo tempo, quello impostato sul timer di trasmissione, cioè il TIMEOUT:
- Se essa riceve il messaggio di ack allora la trasmissione è avvenuta con successo, e non si eseguono le fasi successive.
- Altrimenti la stazione usa una strategia di backoff e aspetta un tempo casuale, prima di tentare la ritrasmissione ripartendo dal punto 1.
- Dopo molte volte che non si ricevono conferme (acknowledgement) allora la stazione abbandona l’idea di trasmettere (canale in avaria).
Protocollo CSMA basico in pseudocodice
N=1;
while(N <= max){
waitUntil(channelFree());
send(data_frame);
waitUntil(ackOrTimeout());
if(ack_received){
exit while;
}else{
/* timeout scaduto: ritrasmissione*/
/* timeout scaduto: ritrasmissione*/
t=random()*WNDW*2^n;
wait(t);
N=N+1;
}
}
/* troppi tentativi: rinuncio a trasmettere*/
Ritardo di propagazione
Una stazione non può rilevare l’occupazione del BUS da parte di una stazione remota semplicemente ascoltando prima di trasmettere a causa di un fenomeno fisico detto ritardo di propagazione del segnale. Il ritardo di propagazione di un segnale è il tempo finito con cui esso viaggia da una parte all’altra di un mezzo trasmissivo ed è dovuto al fatto che esso si propaga nello spazio con una velocità finita:
- Nel vuoto essa è pari alla velocità della luce cioè 300.000Km/sec
- In un conduttore metallico ha un valore inferiore pari a circa 200.000Km/sec
La collisione accade nonostante che due sorgenti, che trasmettono quasi simultaneamente, sentano entrambe il canale libero. Chiaramente una delle sorgenti ha cominciato per prima la trasmissione ma, nonostante ciò, la seconda sente ugualmente il canale libero perchè il messaggio della prima non è ancora arrivato quando questa decide di trasmettere.
In altre parole, se due stazioni A e B trasmettono una di seguito all’altra separate di un tempo Δt e il tempo di propagazione tra A a B è maggiore di Δt allora, ascoltando la portante:
- B sente il canale libero e inizia a trasmettere il suo messaggio mentre c’è quello di A che sta per arrivare.
- ciascuna stazione riterrà di essere l’unica a trasmettere sul canale fino a che la trama di A, che ha trasmesso prima, non arriverrà all’altra stazione B dopo il tempo di propagazione Δt corrispondente alla distanza tra A e B.
La rilevazione reale, da parte di una stazione, di una collisione può avvenire solo dopo l’inizio della trasmissione (o durante o alla fine). Maggiore è la distanza tra due stazioni maggiore sarà il tempo con cui il segnale si propaga dall’una all’altra: td = d/vP
BUS senza collisioni:
 Fig 3
Fig 3
BUS con collisioni:
Una stazione non può rilevare istantaneamente l’occupazione del BUS da parte di una stazione remota a causa di un fenomeno fisico detto ritardo di propagazione. Per questo motivo l’ascolto del canale prima della trasmissione, benchè riduca drasticamente la probabilità di collisioni, non è sufficiente ad azzerarla.
 Fig 4
Fig 4
Riassumendo ALOHA e CSMA
Similitudini:
- Sia ALOHA che CSMA devono implementare un meccanismo di rilevazione della collisione basato su ack
- Sia ALOHA che CSMA rilevano la collisione a seguito dell’evento mancata ricezione del messaggio di ack (allo scadere di un timeout).
- entrambi soffrono del fenomeno delle collisioni
Differenze:
- ALOHA trasmette senza verificare se il canale è occupato o meno, ciò determina maggiore probabiltà di collisione rispetto al CSMA.
- CSMA trasmette solo se “sente” il canale libero, ciò determina minore probabiltà di collisione rispetto ad Aloha.
- CSMA deve implementare un meccanismo di ascolto del canale prima della trasmissione (CCA: Clear Channel Assesment).
Come detto prima nel caso dll’Aloha spesso accade che le collisioni non vengano affatto rilevate perchè ritenuto poco vantaggioso. Le situazioni sono le stesse di prima cioè l’interrogazione periodica dei sensori con dispositivi a basso costo che utilizzano un mezzo radio molto affollato. Si usa ancora il CSMA ma senza ack che, in questo contesto, viene chiamato semplicemente LBT (Listen Before Talk)
CSMA/CD
Fasi CSMA/CD basico
E’ una variante del CSMA/CA in cui si esegue un doppio ascolto del canale:
- prima di trasmettere per stabilire se è libero (accesso LBT)
- durante la trasmissione per rilevare direttamente eventuali collisioni (Collision Detection).
Infatti, l’acronimo significa Carrier Sensing Multiple Access Collision Detection cioè protocollo di Accesso Multiplo con Ascolto della Portante (prima della trasmissione) e rilevazione della Collisione (durante la trasmissione). La rilevazione indiretta delle collisioni mediante l’ack del ricevitore adesso non è più necessaria.
E’ una miglioria del CSMA standard che permette, a fronte di una collisione, un recupero più rapido della trasmissione rispetto al meccanismo dell’ack, dato che quest’ultimo è sicuramente più lento a rilevare le collisioni. Un rapido recupero porta ad una diminuizione del ritardo di trasmissione e quindi ad un aumento della velocità media dei messaggi.
Una stazione trasmittente:
- Al momento che ha una trama pronta, ascolta il canale prima di trasmettere per stabilire se esso è libero o meno.
- Appena essa rileva il canale libero invia immediatamente la trama (messaggio) ma continua ad ascoltare il canale anche durante la trasmissione.
- Se non vengono rilevati segnali di collisione per tutta la durata della trasmissione, allora la trasmissione è avvenuta con successo e non si eseguono le fasi successive.
- Altrimenti, si è rilevata una collisione (tramite lo scatto di un dispositivo a soglia), per cui la stazione arresta la trasmissione corrente, calcola un tempo casuale con l’algoritmo di backoff e aspetta per il tempo di backoff.
- Finito il backoff, la stazione ritenta la trasmissione della stessa trama, ripartendo dal punto 1.
- Dopo molte volte che non si ricevono conferme (acknowledgement) allora la stazione abbandona l’idea di trasmettere (linea interrotta o guasta).
Protocollo CSMA/CD basico in pseudocodice
Soluzione di base per il TX
N=1;
while(N <= max){
waitUntil(channelFree());
sendAndListen(frame);
waitUntil(endOfFrame() or collision());
if(collision()){
stopTransmitting();
send(jamming);
}else{
/* no collision detected */
wait(interframe_delay);
exit while;
}
N=N+1;
}
/* troppi tentativi: rinuncio!*/
 Fig 5
Fig 5
Possiamo determinare tutte le collisioni?
- Se non si ascolta il canale evidentemente no.
- Ma nel CSMA/CD si ascolta solo finchè si trasmette….
 Fig 6
Fig 6
In altre parole, se la trasmissione di un messaggio da parte di una stazione non dura abbastanza a lungo potrebbe succedere che una eventuale collisione si propaghi fino ad essa solo dopo che la trasmissione si è conclusa. Ma se non si trasmette neppure si ascolta il canale, per cui, scaduta la possibilità di rilevare la collisione, la stazione trasmittente deduce, erroneamente, di aver completato la trasmissione del messaggio con successo.
Soluzione: trasmissione abbastanza lunga
- Caso peggiore: il tramittente A è ad un capo e la collisione avviene all’altro capo quando trasmette pure B.
- Per ricevere l’eco della collisione A deve continuare ad ascoltare (cioè a trasmettere) finchè la trama corrotta non si propaga da B fino a lei.
 Fig 7
Fig 7
Come rilevare tutte le collisioni?
Il tempo di propagazione da A a B per 10Mb/sec è 25.6 µsec Il tempo di andata da A a B e poi di ritorno ad A è detto RTT (Round Trip Time) e alla velocità di 10Mb/sec è 51.2 µsec
Prerequisito per rilevare tutte le collisioni:
- ogni stazione deve ascoltare il canale durante la trasmissione per un tempo minimo pari a un RTT cioè 51.2 µsec
- Se la velocità di trasmissione è fissa, la condizione sul tempo si traduce in una condizione sulla lunghezza minima della trama (nel caso di Ethernet 64 byte).
- Cioè ogni stazione deve trasmettere trame lunghe almeno 64 byte
Come reagire a fronte di una collisione?
Se tutte le stazioni ritrasmettono nello stesso istante collidono immediatamente
Soluzione: Backoff esponenziale
- È un tempo casuale di attesa prima di iniziare una nuova trasmissione
- È calcolato in maniera indipendente l’una dall’altra da tutte le stazioni
- Serve a determinare la stazione che deve trasmettere per prima minimizzando il rischio di trasmissioni contemporanee
- È calcolato all’interno di un intervallo (finestra) di contesa
Il tempo di Backoff si calcola in multipli interi di uno slot che è uguale ad un RTT (slot = 1 RTT) secondo la formula:
r = random(0, 2^k – 1)*RTT
- 1-ma collisione : aspetta da 0 a 1 slot
- 2-da collisione : aspetta 0, 1,2 o 3 slots
- i-esima collisione : aspetta 0..2i-1 slots
Finestra di contesa
La finestra di collisione o di contesa (contention Window o CW) è l’intervallo di valori all’interno del quale viene calcolato il tempo casuale di backoff
La finestra di collisione è deterministica (cioè ha un valore non casuale) e può essere fissa o variabile, ad es:[0, (2k – 1)] è variabile e dipende dal numero k di tentativi andati a vuoto.
Una finestra di collisione grande minimizza la probabilità di una collisione ma aumenta il ritardo medio prima della trasmissione che, a sua volta, diminuisce la velocità media di trasmissione.
Una finestra di collisione variabile realizza un buon compromesso tecnico: quando non ci sono collisioni è piccola e il ritardo è minimo, in presenza di collisioni essa si allarga gradatamente per diminuirne la probabilità ad ogni successivo tentativo.
Il tempo di backoff è un numero casuale calcolato tra un valore minimo ed un valore massimo che rappresentano la finestra di collisione. Nel caso del CSMA/CD:
k = min(10, N); //numero di tentativi
r = random(0, 2^k – 1)*RTT; //tempo di backoff
Procollo CSMA/CD completo in pseudocodice
N=1;
while(N<= max){
waitUntil(channelFree());
sendAndListen(frame);
waitUntil(endOfFrame() or collision());
if(collision()){
stopTransmitting();
send(jamming);
k = min (10, N);
r = random(0, 2^k – 1);
wait(r*RTT);
}else{
/* no collision detected */
wait(interframe_delay);
exit while;
}
N=N+1;
}
/* troppi tentativi: rinuncio!*/
Fasi CSMA/CD completo
La stazione trasmittente:
- Al momento che ha una trama pronta, ascolta il canale prima di trasmettere per stabilire se esso è libero o meno.
- Appena essa rileva il canale libero, invia immediatamente la trama ma ascolta anche durante la trasmissione. Se non vengono rilevati segnali di collisione allora la trasmissione è avvenuta con successo e non si eseguono i passi successivi
- Altrimenti la stazione arresta la trasmissione corrente e trasmette invece una particolare sequenza di 32 byte (corrispondente a metà di un RTT), detta sequenza di jamming, che avvisa della collisione le atre stazioni sul canale, queste se, nel frattempo, erano in stato di:
- ricezione, scaricano dal buffer di ricezione quanto ricevuto fino a quel momento.
- trasmissione, arrestano immediatamente la trasmissione e fanno partire il loro algoritmo di backoff.
- Esegue il proprio backoff calcolando un tempo casuale di attesa (multiplo di RTT) e attende per il tempo di backoff prima di ritrasmettere la trama interrotta.
- Esegue la ritrasmissione della stessa trama e ripartendo dal punto 1.
- Dopo molte volte che si rilevano collisioni, allora la stazione abbandona l’idea di trasmettere (canale dato per interrotto).
Sequenza di jamming
La sequenza di Jamming è, in realtà, utile anche per le stazioni che stanno già trasmettendo per risolvere il problema delle collisioni che durino troppo poco. Infatti, nel caso in cui la collisione avvenga tra due stazioni molto vicine, una di loro potrebbe rilevarla (e quindi interromperla) troppo presto per consentirne la rilevazione anche da parte delle stazioni più lontane.
Ciò perchè potrebbe succedere che due messaggi collidenti brevi, quindi sovrapposti e viaggianti in direzioni opposte, dopo un tempo altrettanto breve, si separino facendo così svanire la collisione per le stazioni che vengono da essi, successivamente alla separazione, attraversate (vedi Fig.6).
La soluzione è generare, al momendo della rilevazione di una collisione, una nuova collisione, più lunga di quella originale, in modo che sia sempre possibile la sua rilevazione anche molto lontano dal punto in cui essa è avvenuta. Risultato ottenuto proprio con una lunga sequenza di jamming.
 Fig 8
Fig 8
Riassumendo CSMA e CSMA/CD
Similitudini:
- CSMA e CSMA/CD devono implementare un meccanismo di ascolto del canale prima della trasmissione per stabilire se esso è libero o meno.
Differenze:
- il CSMA rileva la collisione indirettamente (più lentamente) dopo la trasmissione in fase di ricezione, a seguito del mancato arrivo del messaggio di ack (allo scadere di un timeout), Si tratta di una tecnica SW. Trasmissione e ricezione non devono essere contemporanee.
- Il CSMA/CD durante la trasmissione mantiene attiva anche la funzione di ricezione che può rilevare direttamente (istantaneamente quando avviene) una collisione perchè:
- Il segnale “ascoltato” durante la trasmissione ha una potenza più elevata di quello effettivamente trasmesso. É una tecnica HW.
- Il segnale “ascoltato” e decodificato durante la trasmissione ha un valore in bit diverso da quello trasmesso. É una tecnica SW.
CSMA/CA
Non è sempre possibile rilevare le collisioni durante la trasmissione perchè l’ascolto diretto del canale sarebbe impossibile o inefficace (mezzo radio). In queste situazione la rilevazione della collisione può essere soltanto indiretta osservando la mancata ricezione di un ack. Per velocizzare il processo di recupero della trasmissione a fronte di una collisione, nel CSMA/CA i messaggi di ack vengono posti ad un livello di priorità più elevato rispetto agli altri messaggi mettendoli al riparo dalle collisioni. Le collisioni non possono intaccare i messaggi di ack.
Anche in questo caso un rapido recupero della trasmissione migliora la velocità media del dispositivo (ritardi più bassi).
E’ adatto per la trasmissione di messaggi lunghi ed è appropriato per dispostivi con migliore capacità di calcolo quando si è in assenza di problemi di consumo energetico.
Miglioramento del CSMA grazie all’introduzione degli IFS (interframe space):
- Ritardo iniziale di trasmissione (EIFS)
- Short Inter Frame Space (SIFS): ritardo tra una trama e l’invio del suo ack. È il tempo minimo per consentire ai dispositivi HW di commutare dallo stato di ricezione a qello di trasmissione.
- Distributed Inter Frame Space (DIFS): ritardo minimo tra due trame successive in trasmissione.
DIFS = SIFS + (2 * Slot time). Serve a proteggere la trasmissione di un ack da eventuali collisioni SlotTime = CCATime + RxTxTurnaroundTime + AirPropagationTime+ MACProcessingDelayè il tempo per percorrere il tragitto tra due stazioni poste agli estremi più remoti della cella radio.
Vale la disuguaglianza:
SIFS < DIFS < EIFS
CSMA/CA al ricevitore
Protocollo CSMA/CA sul ricevitore in pseudocodice
While (true)
{
WaitUntil(dataFrameArrived());
if(!duplicate())
{ deliver(frame) }
wait(SIFS);
send(ack_frame);
}
La funzione deliver() consegna la trama al livello superiore (ad un protocollo di livello superiore o alla applicazione)
Fasi CSMA/CA al ricevitore
Una stazione ricevente:
- Aspetta l’arrivo di una nuova trama
- Controlla se è una trama duplicate, cioè gia ricevuta
- Controlla il CRC della trama per verificare se è stata ricevuta correttamente se non lo è la consegna al livello superiore e non esegue i passi successivi
- Aspetta un SIFS
- Invia una trama di ack
CSMA/CA sul trasmettitore
Protocollo CSMA/CA sul trasmettitore in pseudocodice
N=1;
while(N <= max){
waitUntil(channelFree());
if(receivedCorruped())
{
wait(EIFS);
}else
{
wait(DIFS);
}
send(data_frame);
waitUntil(ackOrTimeout());
if(ack_received){
exit while;
}else{
/* timeout scaduto: si ritrasmette*/
N=N+1;
}
}
/* troppi tentativi: rinuncio!*/
Fasi CSMA/CA al trasmettitore senza backoff
Una stazione trasmittente:
- Valuta l’ultima trama (messaggio) ricevuto:
- Se la trama precedentemente ricevuta era corrotta prima di trasmettere, aspetta un tempo EIFS
- Altrimenti se la stazione sente il canale occupato aspetta finchè è libero, da quel momento in poi, aspetta un tempo DIFS
- Trascorso il DIFS invia immediatamente la trama
- Aspetta l’arrivo di un ack, se non arriva in tempo, allo scadere di un timeout, avvia la ritrasmissione della stessa trama, ripartendo dal punto 1.
Anche se C, sfortunatamente, valutasse il canale libero ascoltandolo durante il SIFS di B poichè DIFS>SIFS accadrebbe che C ritroverebbe il canale occupato durante la seguente trasmissione dell’ack di B e quindi si fermerebbe:
 Fig 9
Fig 9
Significato di SIFS
Tutti i dispositivi HW hanno una certa inerzia nel passare da una funzione all’altra. In questo caso, un ricevitore impiega un certo tempo per passare dalla modalità di ricezione, attiva durante l’attesa di un messaggio, a quella di trasmissione, necessaria per inviare l’ack a messaggio ricevuto. Questo tempo si può modellare (riassumere) nel ritardo SIFS.
Significato di DIFS
È il tempo di attesa che aspettano tutte le stazioni per trasmettere a partire dalla fine dell’ultima trasmissione valida (invio ack messaggio precedente).
Serve a proteggere la trasmissione di un ack da eventuali collisioni, è sempre:
DIFS = SIFS + (2 * Slot time)
- SIFS dovrebbe essere più breve di DIFS in modo che sia possibile inviare un frame di ACK prima che le altre stazioni riprendano il loro backoff
- Il DIFS dura quanto basta affinchè una qualunque stazione si possa accorgere che il canale è occupato a seguito della trasmissione di un ack. Per fare in modo di essere sicuri che dopo di esso un ack non posssa più arrivare, il DIFS viene calcolato nel caso peggiore
(2 * Slot time ), cioè ipotizzando che le stazioni interessate siano poste agli estremi opposti della cella radio, quelli che sono reciprocamente più distanti.
Nel grafico, DATA e ACK sono tempi di trasmissione (non di propagazione)
Durante il tempo di attesa DIFS l’ack ha il tempo di propagarsi fino alla stazione più remota senza essere disturbato da altre trasmissioni.
Il tempo di attesa DIFS non elimina in assoluto la possibilità di una eventuale collisione perchè può sempre accadere che qualcuno inizi a trasmettere un messaggio un attimo dopo dello scadere del DIFS senza che la stazione in attesa possa rendersene conto a causa del fenomeno del ritardo di propagazione. Ma la collisione può riguardare solo un nuovo messaggio non la trasmissione dell’ack di quello appena inviato.
Il tempo di attesa DIFS è uguale per tutte le stazioni e dopo di esso inizia una finestra di trasmissione, detta finestra di contesa (CW), in cui tutte le stazioni competono per l’accesso al canale avendo solo l’accortezza di ascoltare prima di tramettere, cautela che limita ma non annulla le probabilità di collisioni (per via del ritardo di propagazione).
 Fig 10
Fig 10
Significato di EIFS
EIFS = SIFS + DIFS + ACK_Tx_Time
- usato al posto di DIFS dalle stazioni che hanno ricevuto un frame incomprensibile
- Anche se una stazione non è stata in grado di decodificare il frame, potrebbe essere che invece il destinatario legittimo sia ancora in grado di farlo.
- Se ciò accade, il destinatario dovrebbe avere l’opportunità di restituire un frame di ack; il ritardo EIFS garantisce che la trasmissione del frame di Ack possa procedere senza l’introduzione di eventuali interferenze da parte di chi non è stato in grado di decodificare il frame.
 Fig 11
Fig 11
Backoff
Se due stazioni, dopo averlo ascoltato, trovano il canale libero potrebbero comunque collidere perchè, a causa del ritardo di propagazione, potrebbero non rendersi conto che un’altra stazione ha già cominciato a trasmettere occupando il canale. Una eventuale collisione dei messaggi determina la ricezione di trame corrotte da parte delle stazioni destinatarie che, a sua volta, causa il mancato invio di un ack alle stazioni trasmittenti che, allo scadere del timout di trasmissione, pianificheranno la ritrasmissione del messaggio non ancora confermato.
Se la ritrasmissione avvenisse per tutte le stazioni dopo un ugual ritardo DIFS dal momento in cui entrambe le stazioni sentono il canale libero, ciò determinerebbe presumibilmente una trasmissione simultanea delle due stazioni e quindi una nuova collisione.
 Fig 12
Fig 12
La soluzione è ritrasmettere sempre dopo un tempo casuale (backoff) all’interno di una finestra di contesa
Il backoff casuale di una stazione inizia sempre dopo un tempo di attesa fisso DIFS. La stazione ascolta sempre il canale prima di tramettere e lo fa anche durante il backoff. Ci sono quindi due possibilità:
- il backoff scade e quindi subito dopo la stazione comincia a trasmettere
- il backoff viene interrotto dall’ascolto del canale occupato (da una stazione con backoff più corto) e riprende una volta che il canale ritorna libero.
La trasmissione di un’altra stazione potrebbe anche essere destinata alla stazione stessa per cui il backoff potrebbe anche essere interrotto dalla ricezione di un messaggio.
Backoff con prenotazione
 Fig 13
Fig 13
Nel caso del WiFi in figura, è illustrato un backoff con prenotazione che ha la proprietà di non azzerare, sprecandolo, il tempo di attesa già trascorso da una stazione sul proprio backoff:
- Una stazione fa partire il backoff quando sente il canale libero
- nel frattempo, la stazione in attesa del backoff continua a sentire il canale (CCA):
- se il canale diventa occupato prima che il backoff scada allora la stazione lo “congela” interrompendolo sul valore di tempo già trascorso, senza azzerarlo.
- Nel momento in cui il canale ritorna libero la stazione che era doppiamente in attesa, per il canale libero e per il backoff, adesso rimane in attesa solo per il backoff, ricominciando il conteggio iniziale dal tempo in cui questo era stato interrotto, senza ricalcolarlo daccapo.
Il backoff con prenotazione è una maniera per non perdere la priorità acquisita ricalcolando il backoff da zero. E’ una ottimizzazione per garantire una maggiore equità (fairness) nell’accesso alla risorsa canale che non sempre è implementata in protocolli CSMA/CA diversi dal WiFi.
Protocollo CSMA/CA al trasmettitore con backoff
Pseudocodice
N=1;
while(N <= max){
waitUntil(channelFree());
if(receivedCorruped())
{
wait(EIFS);
}else
{
wait(DIFS);
}
backoff_time = int(random[0,min(255,7*2^(N-1))])*T;
waitUntil(channelFreeDuringBackoff());
send(data_frame);
waitUntil(ackOrTimeout());
if(ack_received){
exit while;
}else{
/* timeout scaduto: si ritrasmette*/
N=N+1;
}
}
/* troppi tentativi: rinuncio!*/
Fasi in linguaggio naturale
Unendo tutto, le fasi del CSMA/CA con il backoff con prenotazione sarebbero:
Una stazione trasmittente:
- Valuta l’ultima trama (messaggio) ricevuto:
- Se la trama precedentemente ricevuta era corrotta prima di trasmettere, aspetta un tempo EIFS
- Altrimenti se la stazione sente il canale occupato aspetta finchè è libero, da quel momento in poi, aspetta un tempo DIFS
- Trascorso il DIFS, una stazione fa partire il backoff quando sente il canale libero
- Aspetta per un tempo pari al tempo di backoff appena calcolato. Nel frattempo, la stazione in attesa del backoff continua a sentire il canale (CCA):
- se il canale diventa occupato prima che il backoff scada allora la stazione lo “congela” interrompendolo sul valore di tempo già trascorso, senza azzerarlo.
- Nel momento in cui il canale ritorna libero la stazione che era doppiamente in attesa, per il canale libero e per il backoff, adesso rimane in attesa solo per il backoff, ricominciando il conteggio iniziale dal tempo in cui questo era stato interrotto, senza ricalcolarlo daccapo.
- Il backoff è terminato e quindi trasmette la trama senza aspettare ulteriormente.
- Aspetta l’arrivo di un ack, se non arriva in tempo, allo scadere di un timeout, avvia la ritrasmissione della stessa trama, ripartendo dal punto 1.
Finestra di contesa variabile
Se accade una collisione durante il backoff spesso ciò significa che due stazioni hanno scelto lo stesso slot nella finestra di backoff. Ad ogni collisione, prima di ritentare la trasmissione, la stazione raddoppia la dimensione della finestra di backoff CW (Content Window o finestra di contesa). Lo scopo di tale raddoppio è quello di adattare la dimensione della finestra al numero di contendenti, in considerazione del fatto che le collisioni sono un indice di “affollamento” del mezzo broadcast (BUS o radio).
 Fig 14
Fig 14
Ottimizzazioni
Accesso immediato e differito
In alcune implementazioni (802.11) il DIFS può creare un accesso senza contesa:
- Se il canale è libero dopo questo tempo si può trasmettere con un accesso immediato, cioè senza attendere alcun backoff.
- Se il canale è occupato, prima o dopo questo tempo, si esegue un accesso differito, cioè un DIFS dopo la fine della trasmissione corrente, scegliendo uno slot casuale all’interno di una finestra di contesa (tramite backoff).
Un accesso senza contesa non vuol dire un accesso senza collisioni, queste sono sempre possibili se, dopo un DIFS, due stazioni iniziano a parlare contemporaneamente.
 Fig 15
Fig 15
Problema della stazione nascosta
Problema:
- Le stazioni A e C non sono visibili una all’altra per cui l’ascolto del canale non è in grado di rilevare se una di loro ha occupato il canale prima dell’altra.
- Se entrambe devono trasmettere a B, sia A che C sentiranno il canale libero e inizieranno la trasmissione delle rispettive trame.
- B riceverà i messaggi provenienti da entrambe le stazioni che, a seguito della collisione, saranno inintelleggibili.
 Fig 16
Fig 16
Soluzione:
- Il trasmettitore prenota dei time slot tramite ll messaggio di controllo RTS (Request To Send) avente per argomento il tempo di trasmissione richiesto, adatto alla lunghezza del messaggio dati.
- Il ricevente conferma la prenotazione tramite il messaggio di controllo CTS (Clear To Send) avente per argomento il tempo prenotato al trasmettitore La stazione ricevente B è visibile da tutti per cui sia dalla stazione A che ha prenotato il canale sia dalle altre, come la C, che potenzialmente potrebbero trasmettere di li a poco
- Il messagio CTS dichiara l’avvenuta assegnazione del canale ad A per cui tutti gli altri, come B e C, si asterranno dal trasmettere per tutta la durata del tempo dichiarato nel CTS.
- normalmente la stazione ricevente che assume il ruolo di “torre di controllo” che gestisce le prenotazioni è l’Access Point (AP) perchè possiede il fondamentale requisito di essere in posizione baricentrica rispetto a tutte le stazioni.
- la gestione con RTS e CTS è ancora distribuita e la decisione in merito alla trasmissione di un RTS è presa dalla singola stazione, indipendentemente dalle altre, ossevando un intervallo DIFS, durante il quale nessun altro sta trasmettendo. Questa modo di procedere si chiama modalità DCF (Distributed Coordination Function) e non prevede l’esistenza di un controllo centralizzato delle trasmissioni di tipo master/slave.
- esiste una seconda modalità, detta PCF (Point Coordination Function), di tipo master/slave, in cui l’AP ha il ruolo di master che stabilisce quale stazione deve parlare, quando e per quanto tempo usando una politica di turnazione delle stazioni (polling).
 Fig 17
Fig 17
CCA Reale e CCA Virtuale
Insieme ad i messaggi di controllo RTS e CTS, viene introdotto un contatore di nome NAV che viene valutato per stabilire l’occupazione logica del canale, l’osservazione del suo valore viene detta anche CCA virtuale.
CCA Reale o fisico: è il Clear Channel Assesment realizzato mediante lascolto effettivo del canale fisico, avviene prima della trasmissione. Presuppone che la stazione sia in stato di ricezione e che un dispositivo a soglia sia pronto a rilevare eventuale energia trasmessa da altre stazioni.
CCA Virtuale: il Clear Channel Assesment virtuale è invece realizzato mediante l’osservazione del contatore NAV. Il NAV è decrementato ad intervalli di tempo fissi e in ciascuno di essi può accadere:
- Il NAV > 0 allora il canale virtuale è considerato occupato
- Il NAV = 0 allora il canale virtuale è considerato libero
I due CCA sono del tutto indipendenti e possono portare a risultati diversi. Lo stato del canale è stabilito dalla lettura di entrambi.
- Quando entrambi (AND logico) rilevano che il canale è libero, solo allora può accadere che il trasmettitore inizi a trasmettere, o subito dopo avere atteso un DIFS o dopo l’attesa di un backoff.
- Il contatore NAV viene impostato da tutte le stazioni al momento in cui queste ricevono un messaggio CTS con il valore del tempo in esso contenuto.
Il valore contenuto nel CTS rappresenta il tempo prenotato dalla stazione autorizzata a trasmettere ed è il tempo che essa ritiene necessario per trasmettere il suo messaggio alla velocità corrente del sistema.
Prenotazione del canale
Il trasmettitore prenota, presso il ricevitore, dei time slot tramite un messaggio di controllo RTS (Request To Send) avente per argomento il tempo di trasmissione necessario per inviare i suoi dati .
Il ricevente conferma la prenotazione tramite il messaggio di controllo CTS (Clear To Send) avente per argomento il tempo prenotato dal trasmettitore. Il messaggio CTS è ricevuto da tutte le stazioni che, col tempo in esso riportato, impostano il proprio contantore di Carrier Sensing detto NAV con il quale tengono conto della prenotazione.
Il NAV viene decrementato periodicamente nel tempo, fino a 0; quando il NAV è diverso da zero, vuol dire che una trasmissione è in atto nelle vicinanze e quindi la stazione si astiene dal trasmettere.
La stazione che ha prenotato il canale durante il NAV può effettuare in sicurezza la trasmissione dei suoi dati perchè il tempo di NAV è, di fatto, al riparo dalle collisioni.
Le collisioni in pratica non possono colpire i messaggi di ack e i dati, gli unici messaggi soggetti a collisione sono le trame di controllo RTS e CTS che però sono molto corte.
 Fig 18
Fig 18
### 802.11 CSMA/CA: flowchart
 Fig 19
Fig 19
### 802.11 CSMA/CA: fasi
Il protocollo CSMA/CA (Carrier Sense Medium Access with Collision Avoidance) funziona nel seguente modo, per una trasmissione da A a B:
- La stazione trasmittente A cerca di determinare lo stato del mezzo valutando il contenuto di NAV (CCA Virtuale) ed ascoltando il mezzo (CCA Reale). Il canale è considerato libero, quando sia il CCA Virtuale che il CCA Reale non rilevano attività (operazione di AND logico tra i due valori). I casi sono due:
- Se il canale rimane libero per un intervallo di tempo DIFS, salta al punto 3.
- Se invece il canale è occupato (o viene occupato durante l’intervallo DIFS), prosegue al punto 2.
- A avvia la procedura di backoff che scade solo quando il canale è libero (CCA fisico e CCA logico soddisfatti entrambi).
- A emette un RTS.
- Se entro un intervallo di tempo ben definito, A non riceve il CTS da B, vuol dire, molto probabilmente, che l’RTS ha colliso con un altro frame;
- Quando B riceve l’RTS, risponde con un CTS.
- Ricevuto il CTS, A può cominciare a trasmettere il frame contenente i dati veri e propri.
- Se entro un intervallo di tempo ben definito, A non riceve un ACK da B, vuol dire che il frame dati non è stato ricevuto correttamente, e quindi A deve ritrasmetterlo ripetendo tutta la procedura.
- Una volta che B ha ricevuto correttamente il frame Dati, risponde con un ACK concludendo il protocollo.
PCF e Supertrama
Un AP può assumere un controllo ancor più rigoroso sull’andamento delle trasmissioni, se svolge un ruolo di Point Coordinator (PC), supportando la Point Coordination Function (PCF). In tal caso, in occasione delle trame Beacon può dare inizio ad un periodo libero da contesa (CFP, Contention Free Period), in cui annuncia un NAV tale da inibire la trasmissione di tutte le altre stazioni.
Il beacon è una particolare sequenza di bit che serve a sincronizzare gli orologi dell’AP con quello di tutte le stazioni e viene trasmessa periodicamente ad intervalli di tempo regolari. La trasmissione regolare del beacon, può però essere posticipata a causa della occupazione del mezzo trasmissivo, ed in tal caso ha luogo dopo che è trascorso un PIFS (PCF IFS) dal momento in cui il mezzo è libero. Un beacon serve anche di indentificare in maniera univoca i dispositivi che li emette grazi ad un id che viene in esso inserito. Per dei dettagli vedi preambolo di sincronizzazione.
La trama dati compresa tra due beacon consecutivi viene detta supertrama (superframe) ed è generalmente divisa in due zone con politiche di accesso al canale diverse:
- una deterministica al riparo dalle collisioni detta CFP (Contention Free Period) e regolata dalla multiplazione statica TDMA, che viene usata per trasmettere i dati delle comunicazioni unicast.
- una probabilistica a contesa, in cui i tentativi di accesso dei dispositivi sono soggetti al rischio di collisione perchè regolata da un protocollo di tipo CSMA/CA, che invece serve per trasmettere delle particolari informazioni broadcast dette advertisement.
Nel caso del WiFi, il NAV CFP (Contention Free Period) inibisce tutte le stazioni dal prendere l’iniziativa di cominciare una trasmissione. Finchè è valido le stazioni comunicheranno in modalità master/slave, cioè risponderanno solo se interrogate.
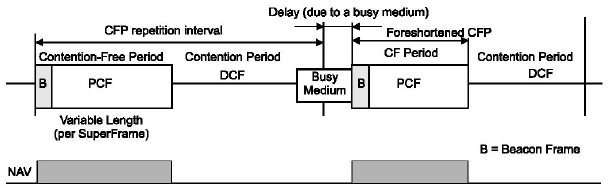 Fig 20
Fig 20
Durante il CFP, il PC invia messaggi di Polling a rotazione verso le stazioni, interrogandole a riguardo della disponibilità di dati da trasmettere. Questà modalità offre il vantaggio di adattarsi meglio alle sorgenti dati di tipo real time caratterizzate da trasmissioni di tipo sincrono. Sorgenti sincrone tipicamente sono: sensori, telefonia VOIP, videoconferenza, streaming, ecc.
 Fig 21
Fig 21
Riassumendo, Normalmente i dispositivi AP lavorano in modalità ibrida DCF e PCF. Vengono trasmessi periodicamente dei beacon e l’intervallo temporale tra un beacon e l’altro viene suddiviso in due zone, una soggetta a trasmissioni di tipo PCF e quindi intrinsecamente al riparo dalle collisioni adatta a trasmissioni sincrone e un’altra di tipo DCF, soggetta a collisioni sugli RTS, dedicata alle trasmissioni asincrone.
Sitografia:
- https://teoriadeisegnali.it/story/802.11/on_desk/accesso.html
- http://ecomputernotes.com/computernetworkingnotes/communication-networks/what-is-aloha
- https://it.pinterest.com/pin/368943394449072984/
- http://www.mathcs.emory.edu/~cheung/Courses/558/Syllabus/00/CSMA/csmacd.html
- http://www.benve.org/Download/Wireless.pdf
- http://infocom.uniroma1.it/alef/802.11/on_desk/accesso.html#Distributed_Coordination_Function_
- https://www.saylor.org/site/wp-content/uploads/2011/10/SAYLOR.ORG-CS402-CSMACOLLISIONAVOIDANCE.pdf
- https://www.slideshare.net/obonaventure/5-sharingapp
- http://www.opentextbooks.org.hk/ditatopic/3611
- https://mrncciew.com/2014/10/12/cwap-802-11-medium-contention/
- https://en.wikipedia.org/wiki/Extended_interframe_space
- https://www.hamilton.ie/publications/Thesis_tianji.pdf
- https://networkengineering.stackexchange.com/questions/64340/whats-the-usage-of-jamming-signal-in-csma-cd