simple-mqtt-esp32-object-IoTFramework
COMANDO UP DOWN MOTORE
Utilizzo
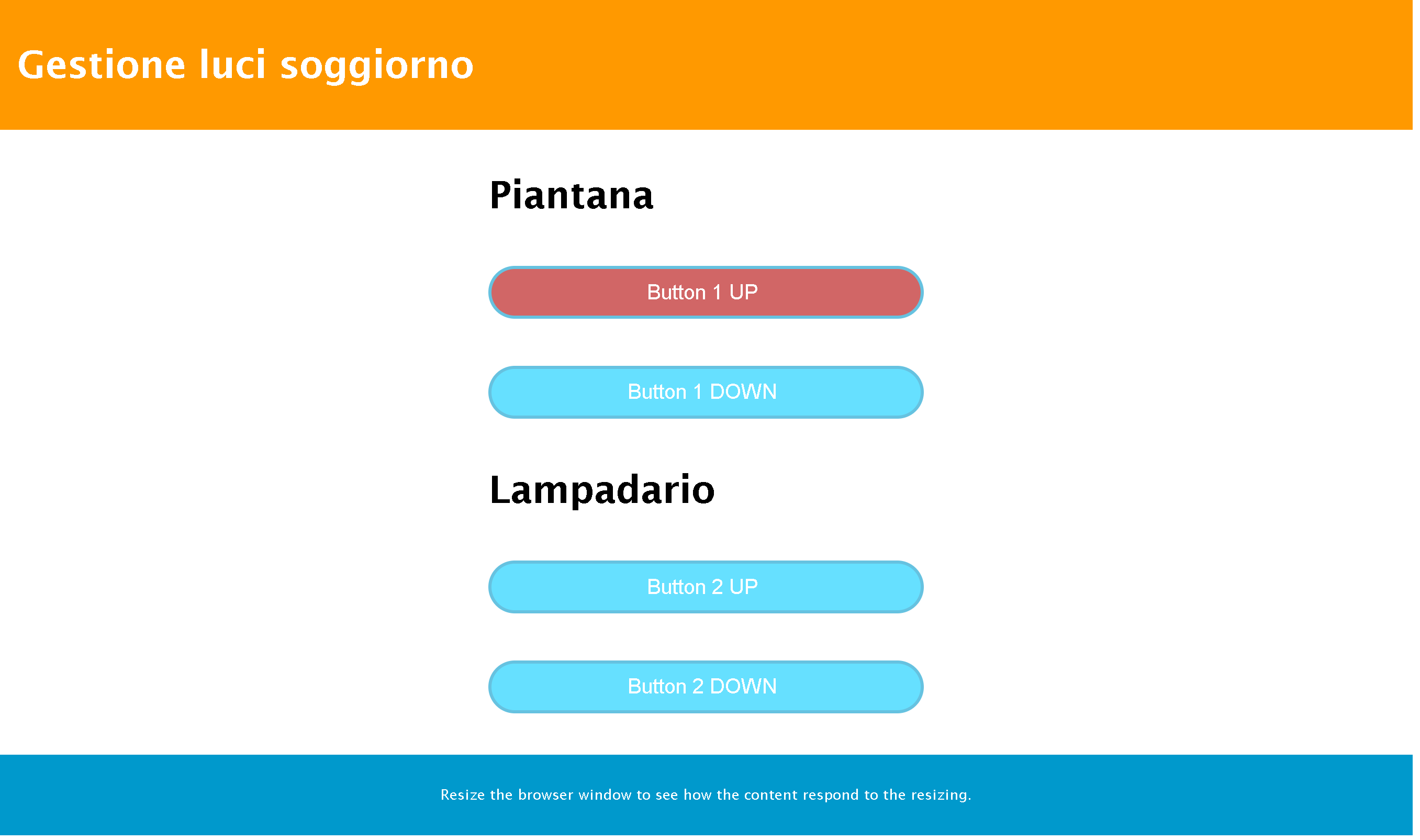
La pagina ha 4 pulsanti con funzioni di UP e DOWN divisi in due gruppi. Un gruppo comanda l’accensione/spegnimento di una singola uscita. Le uscite non sono direttamente attivate dalla libreria perchè sono lasciate volutamente generiche in quanto potrebbero attivare, a seconda dei casi, una porta digitale, un comando MODBUS, un comando sulla seriale, ecc.
Fasi:
- Premendo il pulsante UP quando il motore è fermo allora il motore si avvia in marcia avanti
- Premendo il pulsante DOWN quando il motore è fermo allora il motore si avvia in marcia indietro
- premendo un pulsante qualsiasi quando il motore è in marcia allora il motore si ferma
Le uscite sono richiamate dalla callback motorAction1(int enabled, int dir, uint8_t n) che restituisce il numero del gruppo in n, lo stato del’uscita in enabled con valori possibili true o false e la direzione di marcia con valori possibili 1 o -1.
Layout pagina
La pagina mqttupdown.html può essere caricata sul browser da una cartella sul PC o può essere caricata su un server web di pagine statiche.
Il layout è statico, responsivo, diviso in colonne ed è definito mediante il seguente CSS di tipo GRID:
<style>
.grid-container {
display: grid;
grid-template-columns: 1fr;
}
table {
width: 100%;
}
@media only screen and (min-width: 600px) {
/* For tablets: */
.grid-container {
grid-template-columns: 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr;
}
.col-s-1 {grid-column: span 1;}
.col-s-2 {grid-column: span 2;}
.col-s-3 {grid-column: span 3;}
.col-s-4 {grid-column: span 4;}
.col-s-5 {grid-column: span 5;}
.col-s-6 {grid-column: span 6;}
.col-s-7 {grid-column: span 7;}
.col-s-8 {grid-column: span 8;}
.col-s-9 {grid-column: span 9;}
.col-s-10 {grid-column: span 10;}
.col-s-11 {grid-column: span 11;}
.col-s-12 {grid-column: span 12;}
}
@media only screen and (min-width: 768px) {
/* For desktop: */
.grid-container {
grid-template-columns: 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr 1fr;
}
.col-1 {grid-column: span 1;}
.col-2 {grid-column: span 2;}
.col-3 {grid-column: span 3;}
.col-4 {grid-column: span 4;}
.col-5 {grid-column: span 5;}
.col-6 {grid-column: span 6;}
.col-7 {grid-column: span 7;}
.col-8 {grid-column: span 8;}
.col-9 {grid-column: span 9;}
.col-10 {grid-column: span 10;}
.col-11 {grid-column: span 11;}
.col-12 {grid-column: span 12;}
}
.luci{
border: 1px solid black;
}
</style>
Struttura HTML
La pagina statica ha tre sezioni una sotto l’altra:
- un header con il titolo e le informazioni comuni alla pagina da visualizzare per prima.
- un corpo organizzato mediante un layout a colonne responsive di tipo grid che contiene gli elementi HTML di comando con gli input e le informazioni di output.
- un footer. che contiene informazioni generali da visualizzare per ultime.
La definizione della gerarchia di elementi contenitori e contenuti del corpo dei comandi:
<div class="header">
<h1>Gestione luci soggiorno</h1>
</div>
<div class="grid-container">
<div class="col-4 col-s-3 menu">
</div>
<div class="col-4 col-s-9 menu">
<h1>Piantana</h1>
<div id='form'>
<form>
<input id='up1' type='button' value='Button 1 UP' onmousedown='this.style.opacity="1"' onmouseup='this.style.opacity="0.6"' ontouchstart='this.style.opacity="1"' ontouchend='this.style.opacity="0.6"'>
<br>
<input id='down1' type='button' value='Button 1 DOWN' onmousedown='this.style.opacity="1"' onmouseup='this.style.opacity="0.6"' ontouchstart='this.style.opacity="1"' ontouchend='this.style.opacity="0.6"'>
<br>
<h1>Lampadario</h1>
<input id='up2' type='button' value='Button 2 UP' onmousedown='this.style.opacity="1"' onmouseup='this.style.opacity="0.6"' ontouchstart='this.style.opacity="1"' ontouchend='this.style.opacity="0.6"'>
<br>
<input id='down2' type='button' value='Button 2 DOWN' onmousedown='this.style.opacity="1"' onmouseup='this.style.opacity="0.6"' ontouchstart='this.style.opacity="1"' ontouchend='this.style.opacity="0.6"'>
<br>
</form>
</div>
</div>
<div class="col-4 col-s-12">
</div>
</div>
<div class="footer">
<p>Resize the browser window to see how the content respond to the resizing.</p>
</div>
Callback uscite
void motorAction1(int enabled, int dir, uint8_t n){
Serial.println("Enabled " + String(enabled) + " - dir: " + String(dir)+ " - n: " + String(n));
};
Formato JSON ingressi
//ricarica dela pagina
{"devid":"soggiorno-gruppo06","conf":"255"}
//pressione pulsanti
{"devid":"soggiorno-gruppo06","up1":"255"}
{"devid":"soggiorno-gruppo06","down1":"255"}
Formato JSON feedback
//pressione pulsanti
{"devid":"soggiorno-gruppo06","up1":"255","down1":"0","dr1":"1"}
{"devid":"soggiorno-gruppo06","up1":"0","down1":"255","dr1":"-1"}
{"devid":"soggiorno-gruppo06","up2":"0","down2":"0","dr2":"0"}
//ricarica della pagina o trasmissione periodica stato
{"devid":"soggiorno-gruppo06","up1":"255","down1":"0","dr1":"1"}
{"devid":"soggiorno-gruppo06","up2":"0","down2":"0","dr2":"0"}
Metodi di base comuni a tutti gli oggetti IOT
cmdParser(str,payload,"cmd",MAXLEN). Ricerca un certo commandocmdall’interno di una stringa e ne restituisce il valore sotto forma di stringa sul parametro di out str. Ritornatruese ha trovato un’occorenza del comando,falsealtrimenti.processCmd(String id, String payload). Elabora la richiesta remota interpretando la stringa json del messaggio in base al tipo di dispositivo IOT.
Metodi specifici di Motor
Motor(String id, uint8_t startIndex). Costruttore. P1: devid univoco, P2: indice dispositivo nel gruppo (0,1,2,…)remoteCntrlUp(void). Pulsante marcia avanti, attiva il motore nella direzione 1 se il motore è fermo, lo blocca se il motore è in marcia.remoteCntrlDown(void). Pulsante marcia indietro, attiva il motore nella direzione -1 se il motore è fermo, lo blocca se il motore è in marcia.remoteConf(void). Interroga lo stato corrente del dispositivo.remoteCntrlEventsParser(). Genratore di eventi di feedback ed azioni esterne a partire da ingressi e stato corrente.onAction(SweepCallbackSimple cb). Definisce la callback delle azioni esterne.
Struttura sketch Arduino
Lo sketch mqttt-updown.ino deve essere aperto con l’IDE di Arduino e caricato sul dispositivo ESP32 dopo aver selezionato correttamente la scheda e la porta della seriale e, chiaramente, dopo aver connesso il dispositivo alla porta usb del PC.
Motor m1(mqttid,0);
void setup() {
//inizializza la coda con il valore 0 su tutte le celle
m1.onFeedback(feedbackAction);
m1.onAction(motorAction1);
.........................
mqttClient.onMessage(messageReceived);
}
void loop() {
mqttClient.loop();
//delay(10); // <- fixes some issues with WiFi stability
m1.remoteCntrlEventsParser();
// schedulatore eventi dispositivo
// pubblica lo stato dei pulsanti dopo un minuto
if (millis() - lastMillis > STATEPERIOD) {
lastMillis = millis();
if(mqttClient.connected()){
Serial.println("Ritrasm. periodica stato: ");
m1.remoteConf();
}
}
}
void feedbackAction(String buf){
mqttClient.publish(outtopic, buf);
};
void motorAction1(int enabled, int dir, uint8_t n){
Serial.println("Enabled " + String(enabled) + " - dir: " + String(dir)+ " - n: " + String(n));
};
void messageReceived(String &topic, String &payload) {
Serial.println("incoming: " + topic + " - " + payload);
// Note: Do not use the client in the callback to publish, subscribe or
// unsubscribe as it may cause deadlocks when other things arrive while
// sending and receiving acknowledgments. Instead, change a global variable,
// or push to a queue and handle it in the loop after calling `client.loop()`.
if(topic == intopic){
m1.processCmd(mqttid, payload, MAXLEN);
m2.processCmd(mqttid, payload, MAXLEN);
}
};
Si noti che lo stato del dispositivo è comunicato alla pagina in due modi:
- in maniera asincrona, su richiesta della pagina
- in maniera sincrona, periodicamente ogni STATEPERIOD impostato a 60 sec
Callback MQTT corta
void messageReceived(String &topic, String &payload) {
Serial.println("incoming: " + topic + " - " + payload);
// Note: Do not use the client in the callback to publish, subscribe or
// unsubscribe as it may cause deadlocks when other things arrive while
// sending and receiving acknowledgments. Instead, change a global variable,
// or push to a queue and handle it in the loop after calling `client.loop()`.
//if(topic == intopic){
m1.processCmd(mqttid, payload, MAXLEN);
//}
};
Callback MQTT lunga
/////// gestore messaggi MQTT in ricezione (callback)
void messageReceived(String &topic, String &payload) {
Serial.println("incoming: " + topic + " - " + payload);
// Note: Do not use the client in the callback to publish, subscribe or
// unsubscribe as it may cause deadlocks when other things arrive while
// sending and receiving acknowledgments. Instead, change a global variable,
// or push to a queue and handle it in the loop after calling `client.loop()`.
//if(topic == intopic){
String str;
// COMMANDS PARSER /////////////////////////////////////////////////////////////////////////////////////////////
// ricerca all'interno del payload l'eventuale occorrenza di un comando presente in un set predefinito
////////////////////////////////////////////////////////////////////////////////////////////////////////////////
m1.cmdParser(str,payload,"devid",MAXLEN);
if(str == mqttid){
if(m1.cmdParser(str,payload,"up1",MAXLEN)){
m1.remoteCntrlUp();
}
if(m1.cmdParser(str,payload,"down1",MAXLEN)){
m1.remoteCntrlDown();
}
if(m2.cmdParser(str,payload,"up2",MAXLEN)){
m2.remoteCntrlUp();
}
if(m2.cmdParser(str,payload,"down2",MAXLEN)){
m2.remoteCntrlDown();
}
if(payload.indexOf("\"conf\":\"255\"") >= 0){
m1.remoteConf();
m2.remoteConf();
}
}
//}
};