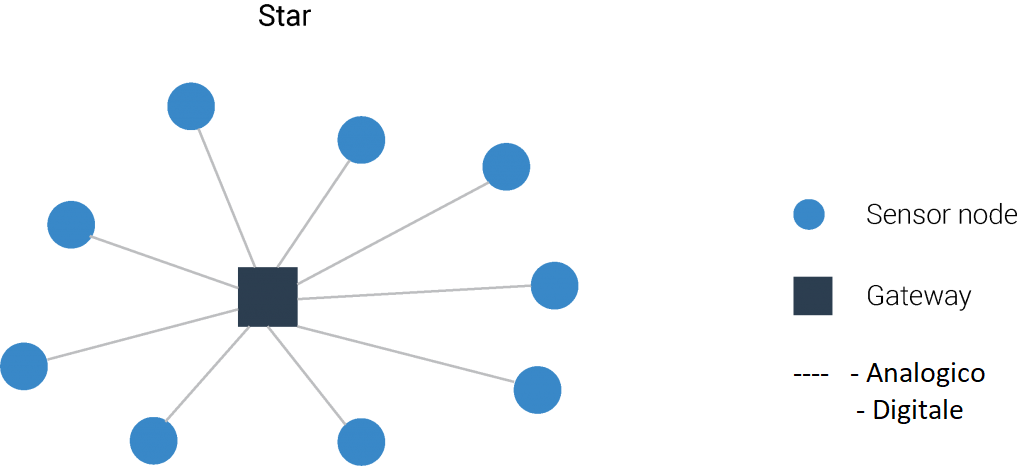
Esempi di collegamenti base con topologia a stella:
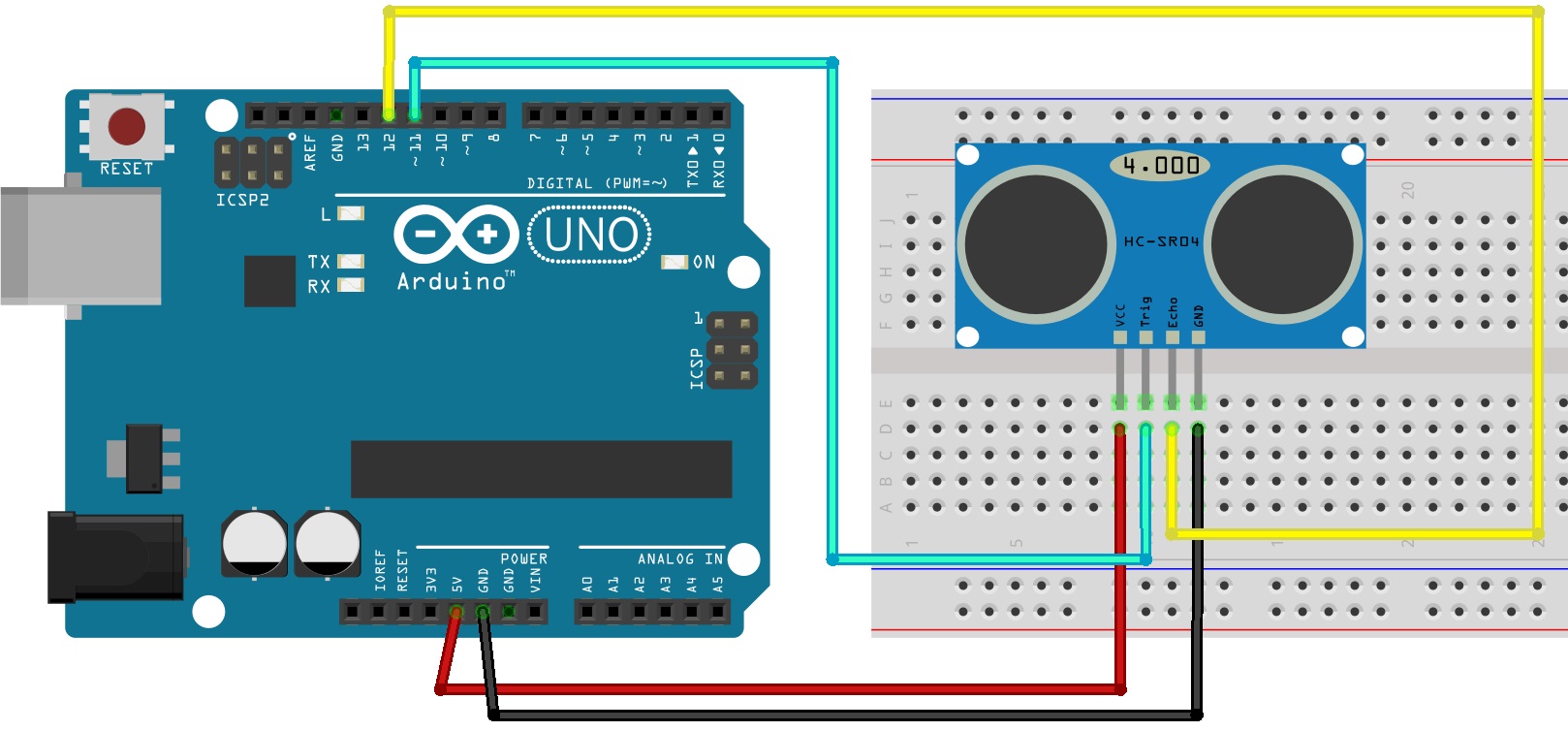
Accesso in scrittura e in lettura su due porte digitali di un sensore ad ultrasuoni:
- si collega su una delle porte digitali del microcontrollore e trasporta bit codificati
- sono punto-punto, cioè un filo (escluso GND che comunque va collegato al sensore) per ogni sensore
- il collegamento è in genere simplex cioè in una direzione sola, da o verso il sensore
- se in ingresso al microcontrollore si collega ad una porta impostata in modalità INPUT
- se in uscita al microcontrollore si collega ad una porta impostata in modalità OUTPUT
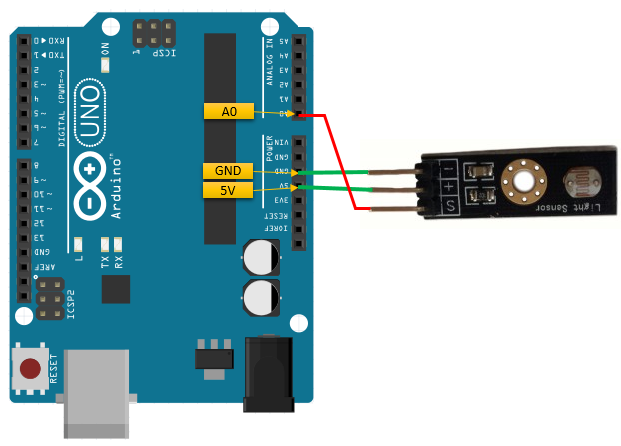
Accesso in in lettura su una porta analogica di un sensore di luminosità:
- si collega su una delle porte analogiche del microcontrollore e trasporta bit codificati
- sono punto-punto, cioè un filo (escluso GND che comunque va collegato al sensore) per ogni sensore
- il collegamento è in genere simplex cioè in una direzione sola, da o verso il sensore
- se in ingresso al microcontrollore si collega ad una porta ADC (Analog Digital Converter) del microcontrollore
- se in uscita al microcontrollore si collega ad una porta PWM (Pulse Width Modulation) del microcontrollore
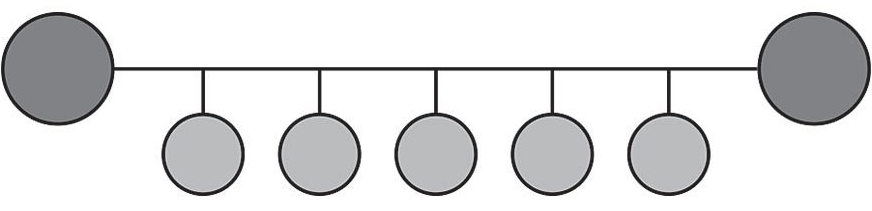
Esempi di collegamenti base con topologia a bus:
Il BUS è un mezzo ad accesso multiplo composto da un unico filo per tutte le stazioni. Il tipo del collegamento in parallelo dei dispositivi lo rende un mezzo broadcast cioè un mezzo trasmissivo dove se una stazione parla tutte le altre ricevono e ascoltano. I mezzi broadcast sono soggetti a collisioni che devono essere risolte costringendo le stazioni a parlare una alla volta mediante un protocollo di arbitraggio. Questi si dividono in due categorie: centralizzati e distribuiti. Quelli che regolano il collegamento dei dispositivi sensori al gateway sono spesso centralizzati e, in ogni caso, lo sono la maggior parte dei protocolli che vedremo di seguito (tranne l’ultimo).
La privatezza dei dati, in assenza di crittografia, è limitata perchè i messaggi inviati da una stazione sono inviati fisicamente a tutte le altre stazioni. Le stazioni però sono normalmente istruite a filtrare i messaggi a loro non destinati, ma, nonostante ciò, questi sono pur sempre a loro visibili e un attacco di sniffing per carpirli da parte di una stazione “malintenzionata” è sempre possibile.
Arbitraggio centralizzato Master/Slave
In un sistema centralizzato una stazione è più importante delle altre perché può avere l’iniziativa di cominciare una comunicazione ed è detta Master. Le altre stazioni hanno un ruolo passivo, nel senso che rispondono solo se sono interrogate dal master mediante una tecnica detta polling e sono dette pertanto Slave. Il polling equivale all’interrogazione periodica di più dispositivi seguita da una risposta immediata. Il master decide chi parla e quando parla a rotazione, seguendo un ordine prestabilito detto round robin, secondo il quale si scandisce ogni interazione richiesta-risposta. Esistono sistemi centralizzati con un solo master e altri multimaster in cui il controllo del BUS passa alternativamente da un master all’altro. La presenza di più master richiede comunque la concomitante presenza un meccanismo di sincronizzazione per evitare sovrapposizioni nell’accesso al BUS (lo devono controllare in maniera esclusiva ed uno alla volta).
Arbitraggio distribuito CSMA/CA
In un sistema distribuito a filo spesso si usano sistemi di arbitraggio CSMA/CA non distruttivi come (Carrier sensing multiple access/collision arbitration). La sincronizzazione dei bit tra le stazioni deve esse molto accurata. Ogni elemento ascolta il bus. Quando lo sente libero, avvia la comunicazione. Se due lo fanno insieme, un meccanismo di arbitrazione permette ad una sola trasmissione di continuare. Nel protocollo CAN si definiscono i bit come “dominante” e come “recessivo”. Un bit dominante vince su un bit recessivo. Se un nodo trasmette un bit dominante e contemporaneamente un altro nodo trasmette un bit recessivo allora sul bus sara’ presente quello dominante. Nel protocollo CAN si definisce il bit logico 0 come bit dominante e il bit logico 1 come bit recessivo. Dal punto di vista elettrico e di interfaccia si può pensare che il bit 1 sia forzato sul bus da un resistore di pull-up mentre lo zero dominante dal un trasnsistor con il drain sul bus. Se un nodo rileva un livello dominante quando sta inviando esso stesso un livello recessivo, uscirà immediatamente dal processo di arbitraggio e si metterà in ascolto, in attesa della fine della trasmissione dominante.
In genere i BUS si trovano in due stati IDLE (riposo) e comunicazione. Lo stato di IDLE è quello predefinito ed è ottenuto tramite una resistenza di pullup collegata sulla linea. Durante lo stato di comunicazione il valore bit 0 è codificato con il livello basso L=0 Volt mentre il valore bit 1 è codificato con lo stesso valore dell’IDLE cioè H. L’inizio della trasmissione di una trama è in genere segnalata da un livello basso L iniziale detto start bit.
Ci sono sistemi a BUS che si connettono direttamente alle porte digitali di un microcontrollore senza driver HW aggiuntivi. I più diffusi sono 1-wire (Dallas), two-wire (I2C) e 3 o 4-wire (SPI). Il collegamento diretto, senza driver HW (bit banging), alle porte digitali del microcontrollore genera sul BUS segnali non bilanciati circostanza che limita la lunghezza ammissibile dei collegamenti da qualche metro ad una decina di metri.
Tutti i tipi di BUS richiedono l’installazione di librerie SW per poter gestire l’accesso al mezzo dall’interno del codice di un applicativo. In genere, ciò si ottiene mediante API di servizio di alto livello e quindi comode da utilizzare. Allo scopo, nel codice del programma, o in un file di configurazione, va riportato il mappaggio tra il numero di porta e il ruolo della stessa all’interno del protocollo, per tutte quelle adoperate per realizzare il BUS.
Esempio di bus Dallas detto anche a 1 filo (one-wire):
- è costituito da un solo filo, escluso il filo GND, comune a tutti i collegamenti e che va collegato anch’esso al sensore.
- il dispositivo riceve l’alimentazione in CC miscelata insieme ai dati. Durante i bit zero, non ricevendo alimentazione dal cavo, il dispositivo la riceve da un condensatore tampone.
- alcuni dispositivi possiedono comunque una linea di alimentazione separata da quella dati esibendo quindi, complessivamente 3 terminali.
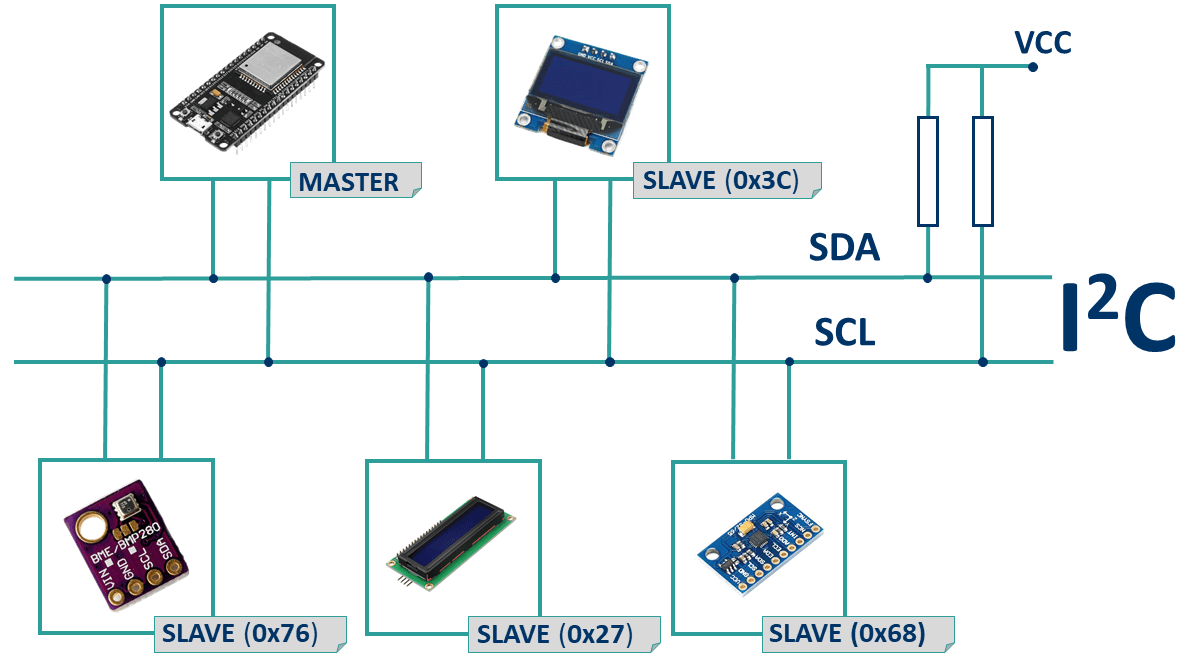
Esempio di bus I2C detto anche a 2 fili (two-wire):
- è costituito da 2 fili, escluso il filo GND, comune a tutti i collegamenti e che va collegato anch’esso al sensore
- terminale SDA (Serial DAta) per i dati
- terminale SCL (Serial CLock) per il clock (per la presenza di questo segnale l’I2C è un bus sincrono)
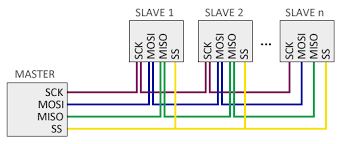
Esempio di bus SPI detto anche 4 fili (four-wire):
- è costituito da 4 fili, escluso il filo GND, comune a tutti i collegamenti e che va collegato anch’esso al sensore
- terminale SCLK - SCK: Serial Clock (emesso dal master) per il clock (per la presenza di questo segnale l’SPI è un bus sincrono)
- terminale SDI – MISO – SOMI – DI - SO: Serial Data Input, Master Input Slave Output (ingresso per il master e uscita per lo slave)
- terminale SDO – MOSI – SIMO – DO – SI: Serial Data Output, Master Output Slave Input (uscita dal master)
- terminale CS – SS – nCS – nSS – STE: Chip Select, Slave Select, emesso dal master per scegliere con quale dispositivo slave vuole comunicare (dalla figura, il segnale SS negato, si comprende che per comunicare con il dispositivo slave deve venire messo a livello logico basso)
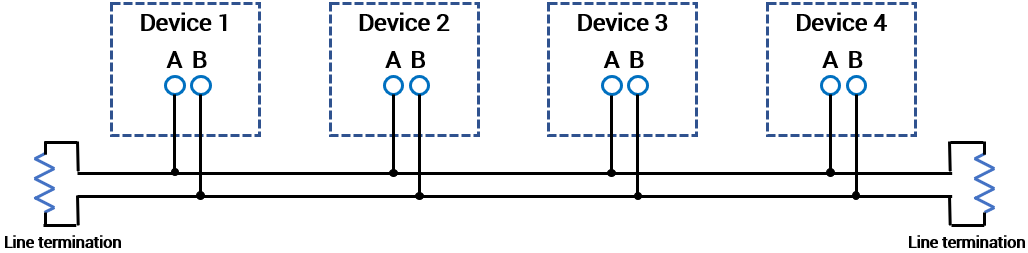
Esempio di bus RS485:
- è costituito da 2 fili, escluso il filo GND, comune a tutti i collegamenti che NON va collegato anch’esso al sensore
- il BUS RS485 è bilanciato per cui non è possibile collegare i suoi terminali direttamente sulle porte digitali di un microcontrollore ma bisogna interporre un driver HW che trasli i livelli da logica TTL (a 5V o 3.3V) a logica bilanciata AB.
- i fili del BUS sono attestati sui morsetti A e B del driver. La differenza A-B codifica il valore del bit trasmesso.
- le linee bilanciate permettono distanze che vanno da un minimo di 30cm ad un massimo di circa 1 Km.
- il numero di dispositivi connettibile dipende dalle implementazioni e dalla massima corrente erogabile sul BUS, accreditato è un numero di almeno 32 dispositivi.
- può essere arbitrato dal protocollo Modbus che gestisce diversi servizi codificati nel campo function code contenuto nel telegramma di ciascuna richiesta
- può essere arbitrato dal protocolllo DMX (Digital MultipleX), uno standard di comunicazione digitale usato principalmente per il controllo dell’illuminazionedi scena nell’industria dello spettacolo.
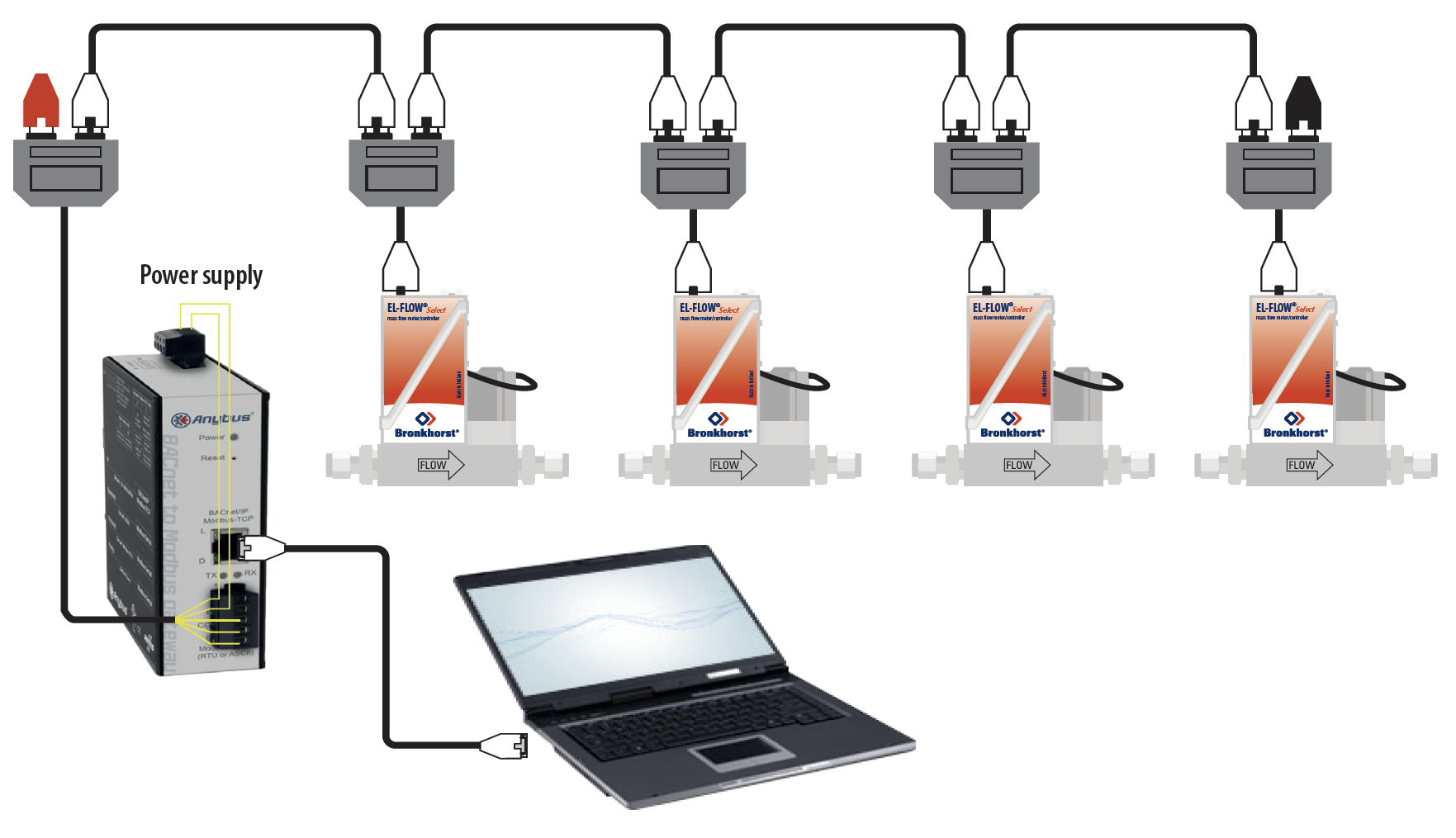
Esempio di attuatori collegati con BUS RS485 arbitrato dal protocollo Modbus:
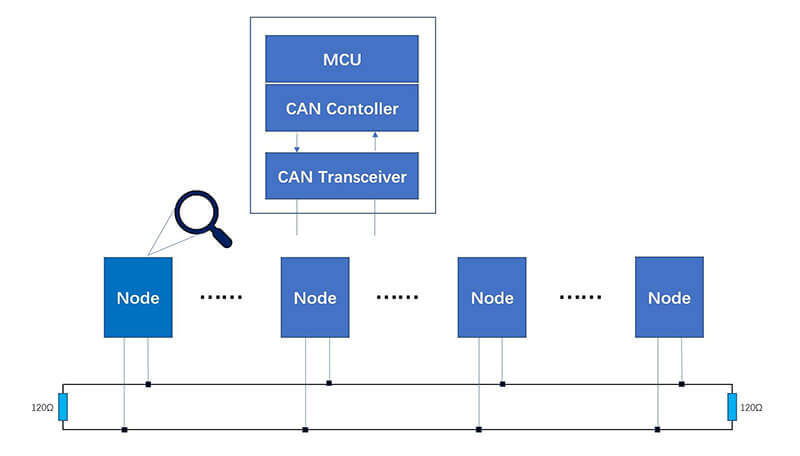
Esempio di bus CAN:
- è diffuso in automotive, in home automation è una possibilità ancora poco utilizzata.
- a differenza di tutti i BUS precedenti, l’accesso è regolato con un protocollo di arbitraggio distribuito CSMA/CA
- scelta economica se la scheda microntrollore possiede già con un driver logico (CAN Controller) a bordo realizzato in HW che espone un’interfaccia CAN TTL nella piedinatura.
- è costituito da 2 fili CANH e CANL
- il CANBus è bilanciato per cui non è possibile collegare i suoi terminali direttamente sulle porte digitali di un microcontrollore ma bisogna interporre un driver HW che trasli i livelli da logica TTL (a 5V o 3.3V) a logica bilanciata HL.
- i fili del BUS sono attestati sui morsetti CANH e CANL del driver. La differenza CANH-CANL codifica il valore del bit trasmesso.
- le linee bilanciate permettono distanze che vanno da un minimo di 40m ad un massimo di circa 13Km (1Mbps-5kbps).
- il numero di dispositivi connettibile dipende dalle implementazioni, dalla massima corrente erogabile sul BUS e dai ritardi, accreditato è un numero di almeno un centinaio di dispositivi.
Abbiamo visto BUS centralizzati e di uso generale che definiscono il livello fisico di una comunicazione via cavo. Degli altri livelli OSI o non forniscono affatto la definizione o ne forniscono una molto essenziale sotto forma di function code. Esistono molti altri stack commerciali che si occupano di domotica e automazione che a livello fisico utilizzano sia reti cablate che wireless. Esempi notevoli sono KNX, BACNet, DALI.
Molti di questi forniscono una definizione elaborata, standard ed esaustiva di tutti i possibili tipi di servizi adoperabili nei vari scenari pratici dell’automazione (dall’accensione di una lampadina all’azionamento di una tapparella, ecc.) spesso catalogati e raccolti in strutture dati dette profili. Molti di questi BUS, per accrescere l’affidabilità, adoperano un arbitraggio del mezzo trasmissivo di tipo peer to peer usando, ad esempio, protocolli di tipo ALOHA o CSMA/CA. Dettaglio protocolli di accesso su mezzi a BUS
Sitografia:
- http://www.iotsharing.com/2017/09/how-to-use-arduino-esp32-can-interface.html
- https://www.microchip.com/en-us/product/MCP2518FD
- https://www.beyondlogic.org/adding-can-controller-area-network-to-the-raspberry-pi/
- https://www.hackster.io/youness/how-to-connect-raspberry-pi-to-can-bus-b60235
- https://www.amazon.it/ARACELI-Electronics-Ricevitore-sviluppo-controller/dp/B07MY2D7TW/ref=asc_df_B07MY2D7TW/?tag=googshopit-21&linkCode=df0&hvadid=575035016065&hvpos=&hvnetw=g&hvrand=14339607445270056898&hvpone=&hvptwo=&hvqmt=&hvdev=c&hvdvcmdl=&hvlocint=&hvlocphy=1008727&hvtargid=pla-1115833342224&psc=1