SCHEDULAZIONE CON I TIMERS HW
La schedulazione dei task normalmente riguarda quei compiti che devono essere ripetuti in maniera periodica, infatti si parla di loop() principale e di loop secondari eventualmente sullo stesso thread (protothread o mediante costrutti async/await) o su altri thread. Lo stesso risultato può essere ottenuto con dei timer HW che realizzano un loop su base evento. L’evento è l’interrupt di un timer HW, il loop è rappresentato dalla calback associata al timer e che viene viene da esso periodicamente richiamata.
Ma un timer si può impostare per generare:
- eventi sincroni cioè periodici dopo intervalli fissi e programmabili
- eventi asincroni cioè aperiodici da eseguire una sola volta (monostabili o one-shot) dopo un certo tempo calcolato nel futuro a partire dal momento in cui avviene il comando di attivazione (start).
Per cui un timer HW offre una versatilità in più se, nello stesso progetto, si vogliono combinare insieme eventi periodici con eventi aperiodici triggerati da eventi su un ingresso o da altri eventi (scadenza di timeout o contatori).
La stessa cosa è in realtà possibile realizzarla anche con i timer SW basati sul polling nel loop principale della funzione millis(). La loro versatilità è uguale se non superiore, ma sono soggetti ad alcune limitazioni che potrebbero renderli non adatti in certi contesti. L’ambito che penalizza di più i timer SW è quello delle applicazioni mission-critical (o critical-time). In questo tipo di applicazioni si deve prevedere che l’esecuzione di certi compiti avvenga in maniera estremamente puntuale, pena l’introduzione di instabilità nel sistema o di perdita di sicurezza per chi lo adopera.
Rispetto agli altri metodi di creazione di base dei tempi (polling della millis(), thread e protothread), è tendenzialmente più legato ad uno specifico vendor di HW e ad una specifica linea di prodotti. Le API dei timer, pur esendo molto simili tra loro, non sono standardizzate e la portabilità del SW nel tempo potrebbe non essere garantita. In ogni caso semplificano parecchio la gestione delle ISR associate a timer HW che altrimenti, eseguita a basso livello, richiede una impostazione di registri interni della CPU che necessita di conoscenze di dettaglio molto specifiche.
I TIMERS HW DI ESP32
Il microcontrollore esp32 ha 4 timer HW. Tutti i timer sono divisi in 2 gruppi, 2 timer in ciascun gruppo. Ogni timer HW può avere una propria configurazione indipendente.
Sebbene siano disponibili timer software di FreeRTOS (il sistema operativo di ESP32) questi timer presentano alcune limitazioni:
- La risoluzione massima è uguale al periodo di tick di RTOS
- Le callback del timer vengono lanciate da un task a bassa priorità
Similmente ad Arduino, ESP32 permette l’accesso diretto ai timer HW in almeno tre modi:
- accesso ai registri HW del timer per impostare il prescaler
- utilizzo di una libreria di sistema che astrae e semplifica le operazioni del punto precedente
- attraverso librerie di terza parti
I timer hardware però, sebbene siano liberi da entrambe le limitazioni precedenti, spesso sono meno convenienti da usare. Ad esempio, i componenti dell’applicazione potrebbero richiedere che gli eventi del timer si attivino in determinati momenti nel futuro, ma il timer hardware contiene un unico valore di “confronto” utilizzato per la generazione di un interrupt.
Ciò significa che è necessario costruire una astrazione in cima ai timer hardware che, nonostante utilizzi ancora il meccanismo delle interruzioni, implementi:
- funzionalità per gestire l’elenco degli eventi in sospeso e per richiamare le callback per questi eventi man mano che si verificano le interruzioni hardware corrispondenti.
- una semplificazione logica del timer HW (un timer logico) che si possa instanziare molte volte, ognuna associandola ad una propria callback. I timer HW sottostanti rimangono però sempre e soltanto 4.
In ESP32, le callback del timer possono essere inviate con due metodi:
ESP_TIMER_TASK. Le callback del timer vengono inviati da un unico taskesp_timerad alta priorità. Poiché tutte le callback vengono smistate dallo stesso task, si consiglia di eseguire solo la minima quantità di lavoro possibile all’interno di una stessa callback. Se sono in esecuzione altri task con priorità superiore aesp_timer, l’invio della callback verrà ritardato fino a quando l’attività esp_timer non avrà la possibilità di essere eseguita.ESP_TIMER_ISR. Le callback del timer vengono inviati direttamente dal gestore di interrupt del timer. Questo metodo è utile per alcune semplici callback che mirano a una latenza inferiore.
La libreria Ticker è un wrapper (involucro) delle’API esp_timer che si interfaccia direttamente con l’HW secondo il metodo ESP_TIMER_TASK. Si adopera con le stesse API su due piattaforme molto diverse (ESP8266 e ESP32) ma entrambe dotate di interfaccia WiFi. Il FW di bordo nel caso di ESP8266 è LWIP ed è essenzialmente uno stack TCP/IP minimale per sistemi embedded. Il FW in uso su ESP32 si chiama IDF. Entrambi forniscono librerie per la gestione di timer HW. Nel caso di ESP8266 si chiama os_timer, nel caso di ESP32 il nome della libreria è esp_timer.
Il motivo dell’interfaccia comune è che si tratta di prodotti molto diffusi della stessa casa produttrice ai quali si vuole fornire una interfaccia di utilizzo uniforme per la gestione dei timer. Funzioni simili sono implementate in quasi tutti i sistemi embedded, Arduino compreso, o tramite librerie di terze parti o direttamente all’interno del core del framework di gestione dell’HW (librerie o OS).
Modalità di utilizzo
La modalità di utilizzo è simile a quella di una usuale ISR. Una funzione di callback viene associata ad un evento di un timer tramite un metodo attach(). La dissociazione si fa con il metodo contrario detach(). Gli eventi possibili sono una chiamata una tantum (one shot o timer monostabile) o una chiamata periodica o timer bistabile. Nella definizione dell’attach() viene anche impostato il tempo di scadenza del timer. Gli eventi possibili sono:
- una chiamata una tantum (one shot o timer monostabile)
- una chiamata periodica o timer bistabile.
I timer HW possono essere:
- fisici. Cioè limitati in numero ai dispositivi HW dedicati a questo scopo effettivamente presenti nel sistema (nell’ESP32 sono 4) e inoltre devono essere riferiti esplicitamente nel codice con un loro specifico id (un numero da 1 a 4).
- logici o virtuali. Sono virtualmente di numero infinito e rappresentano delle astrazioni SW del sottostante HW fisico che è condiviso in qualche modo da uno strato di gestione trasparente al programmatore.
La possibilità di poter instanziare un timer logico per ogni task, a sua volta definito all’interno di una certa callback, rende l’utilizzo dei timer una strada effettivamente percorribile per la realizzazione di uno schedulatore di compiti sia periodici che one shot (esecuzione singola non ripetuta). La schedulazione dei compiti inoltre rimane molto precisa perchè collegata a ISR eseguite da segnali di interrupt lanciati da timer fisici.
Si ricorda che in C e in C++ le variabili globali a comune tra ISR e loop() principale e suscettibili di modifiche da parte di entrambi andrebbero dichiarate tutte con il qualificatore volatile.
Limitazioni nell’utilizzo
I timer richiamano particolari funzioni di callback , le ISR, che sono attivate a seguito di un interrupt HW (timeout del timer). Nei sistemi multi-core questi interrupt possono essere chiamati solo dal core che ha eseguito il timer. Ciò significa che se si utilizza un timer per attivare un interrupt, è necessario assicurarsi che l’interrupt venga chiamato solo dal core che sta eseguendo il timer.
le ISR di base non sono interrompibili a meno di impostare apposite istruzioni che lo consentono. Interrompere una ISR potrebbe causare inconsistenze nella gestione delle risorse condivise con il loop o altri thread. D’altra parte, una ISR che non si interrompe per molto tempo impedisce la tempestiva esecuzione delle altre ISR dovute ad interruzioni simultanee o temporalmente vicine.
Esistono limitazioni speciali su ciò che può e non può essere fatto all’interno delle ISR nella maggior parte dei controllori:
- Ad esempio, non è consentito allocare memoria dinamica all’interno di una ISR.
- una ISR che esegue una logica complessa potrebbe essere eseguita così lentamente da creare instabilità del sistema dovuta al fatto che altre interruzioni, che gestiscono servizi essenziali del sistema, non sono state prontamente soddisfatte. Un gestore di interrupt dovrebbe essere sempre una funzione breve che esegue il lavoro minimo necessario per modificare delle variabili esterne.
- In genere, in molte implementazioni, callback diverse di uno stesso timer vengono eseguite in sequenza e non su thread paralleli per cui operazioni bloccanti come le
delay(), oltre a causare possibili instabilità (sono ISR basate su interrupt), ritardano l’esecuzione delle callback a seguire. - eseguire task complessi con un timer HW è possibile a patto che questi vengano resi interrompibili senza creare problemi, e ciò si può ottenere eseguendoli in un altro thread o nel loop principale. Nel loop principale, un task complesso può sempre essere immediatamente attivato da una ISR che asserisce un opportuno flag di avvio.
Timers SW vs Timer HW
Se con la funzione get() di un timer SW si desiderasse controllare una scadenza, cioè vedere se è passato il tempo necessario per compiere una certa azione (modificare una variabile o chiamare una funzione), allora si dovrebbero soddisfare due esigenze:
- verificare la verità della condizione
get() > timeouted eseguire, eventualmente, l’azione prevista al timeout (scadenza) del timer. - eseguire la valutazione al punto precedente periodicamente, finchè essa non accade.
I due requisiti precedenti si traducono nell’azione di eseguire il polling della funzione get() nel loop(), aLla massima velocità o, più lentamente, ogni tot millisecondi. Nella vita reale, si può assimilare ad un polling della get() l’osservazione periodica di un orologio a muro effettuata con lo scopo di individuare il momento esatto in cui deve essere eseguita una certa azione, ad esempio, l’estrazione dal forno di un ciambella.
Se si volesse fare la stessa cosa con un timer HW allora ci si renderebbe conto che il polling non è più necessario perchè, al timeout, attraverso, un segnale proveniente dal timer HW, viene attivato l’ISR associata a quel segnale che, a sua volta, comanda l’esecuzione di una callback definita al suo interno. Per rimanere alla metafora precedente, adesso non è più necessario osservare periodicamente l’orologio alla parete, perchè un timer, impostato ad inizio cottura, avviserà con un segnale acustico il pasticciere quando il momento di togliere il dolce dal forno sarà arrivato .
I TIMERS VIRTUALI DI ESP32
E’ una libreria che permette di allocare un numero arbitrario di timers virtuali a partire dal numero presente nelle varie versioni di ESP32 (tipicamente sono 4 timer).
Esempio di dichiarazione e instanziazione di un oggetto timer:
Ticker periodicTicker;
Esempio delle due modalità di impostazione:
periodicTicker.attach_ms(5000, periodicPrint);
onceTicker.once_ms(5000, oncePrint);
Esempio completo:
#include <Ticker.h>
Ticker periodicTicker;
int executionsCount = 0;
void periodicPrint(int maxExecutionsCount) {
Serial.print("printing in periodic function. Exec nr: ");
Serial.println(executionsCount+1);
executionsCount++;
if(executionsCount>=maxExecutionsCount){
periodicTicker.detach();
}
}
void setup() {
Serial.begin(115200);
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
int maxExecutionsCount=10;
periodicTicker.attach_ms(5000, periodicPrint, maxExecutionsCount);
}
void loop() {}
Simulazione su Esp32 con Wowki: https://wokwi.com/projects/348968576484377172
L’esp_timer è un set di APIs che fornisce timer one-shot e periodici, con risoluzione di tempo dei microsecondo e 64-bit di range di conteggio. In ogni caso è bene tenere presente che:
- la libreria Ticker fornisce però la precisione del millisecondo quindi se si ha bisogno di qualcosa di più granulare, è utile sapere che le funzioni sottostanti sono più flessibili.
- le funzioni di callback non è detto che vengano eseguite immediatamente quando si attiva il timer hardware. L’effettiva implementazione dell’API IDF esegue la chiamata annidata di una funzione ausiliaria che potrebbe ritornare con un certo ritardo.
- se si registrano callback multiple per uno stesso timer, maggiore sarà il ritardo per le callback che verranno chiamate dopo, dato che per essere eseguite loro devono necessariamente ritornare le precedenti.
- le callback sono chiamate da funzioni ISR lanciate da segnali di interrupt provenienti dai timer. Le ISR di norma dovrebbero essere molto brevi e, in ogni caso, mai bloccanti, per evitare instabilità del sistema. Invece di eseguire operazioni bloccanti nella callback del ticker è consigliabile impostare li un flag e controllare quel flag all’interno della funzione loop.
#include <Ticker.h>
Ticker periodicTicker1;
Ticker periodicTicker2;
int led1 = 13;
int led2 = 12;
void periodicBlink(int led) {
Serial.print("printing periodic blink led ");
Serial.println(led);
digitalWrite(led, !digitalRead(led));
}
void setup() {
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
Serial.begin(115200);
periodicTicker1.attach_ms(500, periodicBlink, led1);
periodicTicker2.attach_ms(1000, periodicBlink, led2);
}
void loop() {
int count = 0;
while(true){
Serial.print("Doing stuff... ");
Serial.println(count);
count += 1;
if(count >= 10)
break;
delay(1000);
}
Serial.print("Ending timers...");
periodicTicker1.detach();
periodicTicker2.detach();
}
Simulazione su Esp32 con Wowki: https://wokwi.com/projects/348969741870694996
Semaforo con un timer HW
Può essere realizzato efficacemente con un solo timer in quanto accade che ad ogni transizione di colore scade il timer della transizione corrente e, subito dopo, si attiva quello della transizione di colore successiva, per cui i tempi di attivazione dei timer coinvolti sono sempre consecutivi e quindi mai sovrapposti.
#include <Ticker.h>
Ticker onceTicker;
int led_verde = 13;
int led_rosso = 14;
int led_giallo = 12;
int tverde = 5000;
int tgiallo = 2000;
int trosso = 10000;
void verde_giallo() {
digitalWrite(led_verde, LOW);
digitalWrite(led_giallo, HIGH);
onceTicker.once_ms(tgiallo, giallo_rossa);
}
void giallo_rossa() {
digitalWrite(led_giallo, LOW);
digitalWrite(led_rosso, HIGH);
onceTicker.once_ms(trosso, rossa_verde);
}
void rossa_verde() {
digitalWrite(led_rosso, LOW);
digitalWrite(led_verde, HIGH);
onceTicker.once_ms(tverde, verde_giallo);
}
void setup() {
pinMode(led_verde, OUTPUT);
pinMode(led_rosso, OUTPUT);
pinMode(led_giallo, OUTPUT);
digitalWrite(led_verde, HIGH);
onceTicker.once_ms(tverde, verde_giallo );
}
void loop() {
//int count = 0;
delay(10);
}
Simulazione su Esp32 con Wowki: https://wokwi.com/projects/387700784888357889
I TIMERS HW DI ARDUINO
Arduino permette l’accesso diretto ai suoi timer HW in almeno due modi:
- accesso ai registri HW del timer per impostare il prescaler
- attraverso librerie di terza parti
Le librerie utilizzate di seguito però non permettono la realizzazione di timer logici ciascuno con una propria callback e tutti associati ad uno stesso timer HW, per cui è necessario associare un task alla volta ad ogni timer HW utilizzabile nel sistema in uso (ad esempio, 2 in Arduino Uno e 4 in Arduino Mega). Queste limitazioni rendono l’utilizzo esteso dei timer HW come schedulatori di compiti abbastanza problematico.
Una soluzione potrebbe essere inserire all’interno della callback di un timer HW uno schedulatore di compiti con cui poter realizzare il filtraggio degli eventi da eseguire nel futuro come quelli visti nelle sezioni Schedulatore di compiti basato sul polling della millis() oppure utilizzando librerie di terze parti come SimpleTimer (https://github.com/marcelloromani/Arduino-SimpleTimer/tree/master/SimpleTimer) oppure quella presentata nell’esempio proposto nel paragrafo sugli scheduler time tick scheduler
Di seguito è riportato un esempio in cui due task che realizzano un blink sono affidati a due timers HW diversi che realizzano una schedulazione la cui tempistica non è per nulla influenzata dai delay nel loop (interrotti da interrupt) ma è li regolata dai comandi di disabilitazione detachInterrupt().
Arduino con la libreria TimerInterrupt https://github.com/khoih-prog/TimerInterrupt
#define TIMER_INTERRUPT_DEBUG 0
#define USING_16MHZ true
#define USING_8MHZ false
#define USING_250KHZ false
#define USE_TIMER_0 false
#define USE_TIMER_1 true
#define USE_TIMER_2 true
#define USE_TIMER_3 false
#include "TimerInterrupt.h"
int led1 = 13;
int led2 = 12;
void periodicBlink(int led) {
Serial.print("printing periodic blink led ");
Serial.println(led);
digitalWrite(led, !digitalRead(led));
}
void setup() {
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
Serial.begin(115200);
// Select Timer 1-2 for UNO, 0-5 for MEGA
// Timer 2 is 8-bit timer, only for higher frequency
ITimer1.init();
ITimer1.attachInterruptInterval(500, periodicBlink,led1);
// Select Timer 1-2 for UNO, 0-5 for MEGA
// Timer 2 is 8-bit timer, only for higher frequency
ITimer2.init();
ITimer2.attachInterruptInterval(1000, periodicBlink,led2);
}
void loop() {
int count = 0;
while(true){
Serial.print("Doing stuff... ");
Serial.println(count);
count += 1;
if(count >= 10)
break;
delay(1000);
}
Serial.print("Ending timers...");
ITimer1.detachInterrupt();
ITimer2.detachInterrupt();
}
PROBLEMA DEL NUMERO LIMITATO DI TIMER HW
Esistono dei limiti nel numero dei timer HW a bordo di un sistema a microcontrollore. ESP32, ad esempio ne ha solo 4, virtualizzabili in un numero indefinito in C++, non virtualizzabili in python. Arduino, nelle varie versioni (come prortotipo di microcontrollori più semplici) ne ha un numero ridotto e non virtualizzabile.
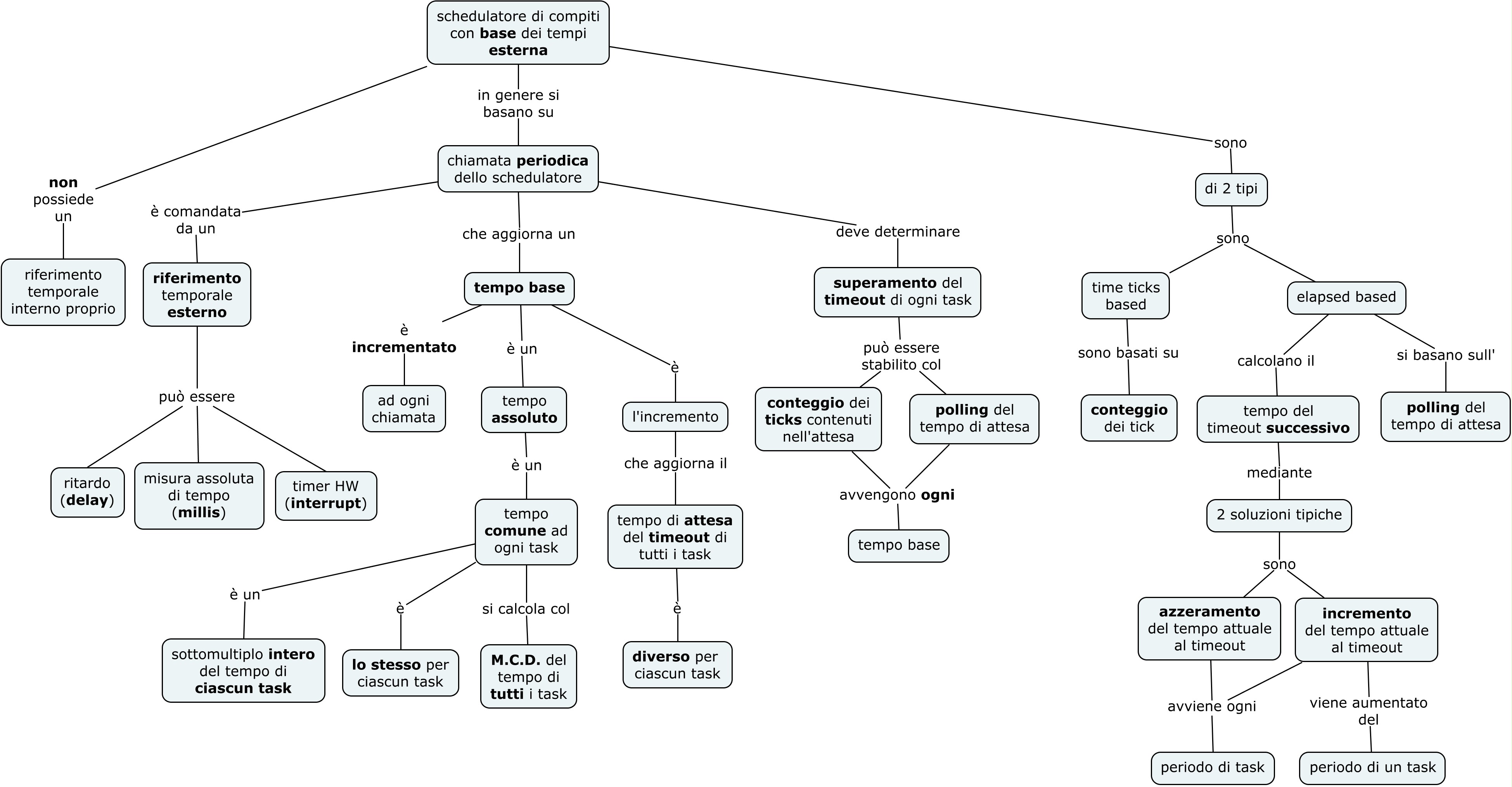
Se i task da mandare in esecuzione in parallelo sono in numero maggiore dei timer allocabili (HW o virtuali) allora bisogna condividere un timer tra più task e per questo scopo si possono usare le solite tecniche di schedulazione che permettono, a fronte di un tempo comune (tempo base), di generare i tempi propri di ciascun task. Invocando lo schedulatore in corrispondenza del momento dello scadere (elapsed) di questi tempi, viene invocata la funzione (o il blocco di codice) del task.
TIMERS HW SCHEDULATI TRAMITE AGGIORNAMENTO DEL PERIODO DEL TASK
Gli schedulatori utilizzati sono due:
- basato su https://www.ics.uci.edu/~givargis/pubs/C50.pdf e in https://www.cs.ucr.edu/~vahid/rios/
- basato su https://github.com/marcelloromani/Arduino-SimpleTimer/tree/master/SimpleTimer e su Generazione di tempi assoluti
Entrambi possono essere utilizzati a partire da una generazione di tempi costante (delay, millis(), timer HW). Per una dissertazione più accurata sul loro utilizzo vedi Schedulatore di compiti basato sul polling della millis()
#include <Ticker.h>
Ticker periodicTicker1;
Ticker periodicTicker2;
int led1 = 12;
int led2 = 14;
int led3 = 27;
int led4 = 5;
int led5 = 4;
int led6 = 2;
int leds1[] = {led1, led2, led3};
int leds2[] = {led4, led5};
//parametri dello sheduler 1
volatile unsigned long precm = 0;
unsigned long tbase1 = 500;
volatile unsigned long precs[]= {0, 0};
unsigned long period1[] = {1500, 6000};
//parametri dello sheduler 2
unsigned long elapsedTime[] = {0, 0, 0};
unsigned long period2[] = {500, 2000, 3000};
int tbase2 = 500;
void periodicBlink(int led) {
digitalWrite(led, !digitalRead(led));
}
void scheduleAll(int *leds){
// task 1
if (elapsedTime[0] >= period2[0]) {
periodicBlink(leds[0]);
elapsedTime[0] = 0;
}
elapsedTime[0] += tbase2;
// task 2
if (elapsedTime[1] >= period2[1]) {
periodicBlink(leds[1]);
elapsedTime[1] = 0;
}
elapsedTime[1] += tbase2;
// task 3
if (elapsedTime[2] >= period2[2]) {
periodicBlink(leds[2]);
elapsedTime[2] = 0;
}
elapsedTime[2] += tbase2;
}
void setup() {
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
pinMode(led5, OUTPUT);
pinMode(led6, OUTPUT);
Serial.begin(115200);
//Inizializzazione dei task
for(int i=0; i<2; i++){
precs[i] = precm -period1[i];
}
//inizializzazione dello scheduler 2
for(int i=0; i<3; i++){
elapsedTime[i] = period2[i];
}
//configurazione timers HW
periodicTicker1.attach_ms(500, scheduleAll, leds1);
periodicTicker2.attach_ms(1000, periodicBlink, led6);
}
void loop() {
delay(500);
precm += tbase1;
// task 1
if ((precm - precs[0]) >= period1[0]) {
precs[0] += period1[0];
periodicBlink(leds2[0]);
}
// task 2
if ((precm - precs[1]) >= period1[1]) {
precs[1] += period1[1];
periodicBlink(leds2[1]);
}
}
Simulazione su Arduino con Wowki: https://wokwi.com/projects/371810634603304961
Pulsante toggle con antirimbalzo insieme a blink
In questo esempio si utilizza un unico timer HW come base dei tempi per uno schedulatore SW che gestisce la tempistica di due task:
- uno per la relizzazione di un tasto toggle con proprietà di antirimbalzo
- un’altra per la realizzazione del blink periodico di un led
Le operazioni benchè semplici vengono considerate come prototipi di task più complessi e magari soggetti a ritardi considerevoli. In questa circostanza la loro esecuzione all’interno di una ISR è sconsigliata per cui essi vengono eseguiti nel loop() principale su segnalazione di un flag asserito dentro la ISR del timer.
#include <Ticker.h>
// Inspired from https://www.cs.ucr.edu/~vahid/rios/
Ticker periodicTicker1;
int led1 = 13;
int led2 = 12;
int pulsante=27;
byte precval;
byte stato= LOW;
unsigned long period[2];
unsigned long elapsedTime[2];
void (*tickFct[2])(void);
volatile bool timerFlag;
unsigned long tbase;
uint8_t tasknum = 2;
void periodicBlink500() {
digitalWrite(led1, !digitalRead(led1));
}
void on50msEvents(){
byte val = digitalRead(pulsante); //pulsante collegato in pulldown
//val = digitalRead(!pulsante); //pulsante collegato in pullup
if(precval==LOW && val==HIGH){ //rivelatore di fronte di salita
stato = !stato; //impostazione dello stato del toggle
//Serial.println(stato);
digitalWrite(led2, stato);
}
precval=val;
}
void setup(){
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
Serial.begin(115200);
periodicTicker1.attach_ms(50, timerISR);
elapsedTime[0] = 0;
elapsedTime[1] = 0;
period[0] = 50;
period[1] = 500;
tickFct[0] = on50msEvents;
tickFct[1] = periodicBlink500;
tbase = 50;
// task time init
timerFlag = false;
for(int i=0; i<tasknum; i++){
elapsedTime[i] = period[i];
}
}
void timerISR(void) {
if (timerFlag) {
Serial.println("Timer ticked before task processing done");
}
else {
timerFlag = true;
}
return;
}
void scheduleAll(){
for(int i=0; i<tasknum; i++){
if(elapsedTime[i] >= period[i]) {
(*tickFct[i])();
elapsedTime[i] = 0;
}
elapsedTime[i] += tbase;
}
}
void loop()
{
if(timerFlag){
scheduleAll();
timerFlag = false;
}
delay(1);
// il codice eseguito al tempo massimo della CPU va qui
}
Di seguito il link della simulazione online con Tinkercad su Arduino: https://wokwi.com/projects/352790112505422849
TIMERS HW DI ARDUINO SCHEDULATO CON AGGIORNAMENTO DEL TEMPO BASE
Si tratta della stessa situazione dell’esempio precedente soltanto che adesso c’è un task in più mentre i timer HW a disposizione sono ancora soltanto due. I task complessivamente in esecuzione sono quattro:
- uno in esecuzione nel loop schedulato da un delay() casuale che simula task pesanti dalla durata impredicibile
- uno affidato ad un proprio timer HW che ne programma l’esecuzione ad intervalli precisi, eventualmente sottraendo l’esecuzione al task nel loop mediante un segnale di interrupt
- due affidati ad un unico timer HW condiviso che esegue ad intervalli di tempo precisi uno schedulatore SW basato sul polling della funzione millis. Lo schedulatore viene richiamato in intervalli di tempo comuni ai due task che poi vengono filtrati mediante dei timer SW.
#define TIMER_INTERRUPT_DEBUG 0
#define USING_16MHZ true
#define USING_8MHZ false
#define USING_250KHZ false
#define USE_TIMER_0 false
#define USE_TIMER_1 true
#define USE_TIMER_2 true
#define USE_TIMER_3 false
#include "TimerInterrupt.h"
int led1 = 13;
int led2 = 12;
int led3 = 11;
int led4 = 10;
unsigned long period[2];
volatile unsigned long precs[2];
volatile unsigned long precm;
unsigned long tbase = 100;
void periodicBlink(int led);
void schedule();
void schedule()
{
precm += tbase;
// task 1
if ((precm - precs[0]) >= period[0]) {
precs[0] += period[0];
digitalWrite(led1,!digitalRead(led1)); // stato alto: led blink
}
// task 2
if ((precm - precs[1]) >= period[1]) {
precs[1] += period[1];
digitalWrite(led2,!digitalRead(led2)); // stato alto: led blink
}
// il codice eseguito al tempo massimo della CPU va qui
}
void periodicBlink(int led) {
Serial.print("printing periodic blink led ");
Serial.println(led);
digitalWrite(led, !digitalRead(led));
}
void setup() {
//randomSeed(millis());
randomSeed(analogRead(0));
precs[0]=0;
precs[1]=0;
period[0] = 300;
period[1] = 500;
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
Serial.begin(115200);
// Select Timer 1-2 for UNO, 0-5 for MEGA
// Timer 2 is 8-bit timer, only for higher frequency
ITimer1.init();
ITimer1.attachInterruptInterval(100, schedule);
// Select Timer 1-2 for UNO, 0-5 for MEGA
// Timer 2 is 8-bit timer, only for higher frequency
ITimer2.init();
ITimer2.attachInterruptInterval(1000, periodicBlink,led3);
}
void loop() {
unsigned randomDelay = random(10, 2000);
Serial.print("delay: ");Serial.println(randomDelay);
delay(randomDelay);
digitalWrite(led4, !digitalRead(led4));
}
}
Simulazione su Arduino con Wowki: https://wokwi.com/projects/371840713313082369
TIMERS HW DI ARDUINO SCHEDULATO CON CONTEGGIO DEI TIMES TICK
Si tratta della stessa situazione dell’esempio precedente in cui ci stanno tre task da eseguire con precisione e soltanto due timer HW per farlo. I task complessivamente in esecuzione sono quattro:
- uno in esecuzione nel loop schedulato da un delay() casuale che simula task pesanti dalla durata impredicibile
- uno affidato ad un proprio timer HW che ne programma l’esecuzione ad intervalli precisi, eventualmente sottraendo l’esecuzione al task nel loop mediante un segnale di interrupt
- due affidati ad un unico timer HW condiviso che esegue ad intervalli di tempo precisi uno schedulatore SW basato sul polling della funzione millis. Lo schedulatore viene richiamato in intervalli di tempo comuni ai due task che poi vengono filtrati mediante conteggio e selezione dei times tick.
#define TIMER_INTERRUPT_DEBUG 0
#define USING_16MHZ true
#define USING_8MHZ false
#define USING_250KHZ false
#define USE_TIMER_0 false
#define USE_TIMER_1 true
#define USE_TIMER_2 true
#define USE_TIMER_3 false
#include "TimerInterrupt.h"
int led1 = 13;
int led2 = 12;
int led3 = 11;
int led4 = 10;
unsigned long period, step, nstep;
volatile unsigned long prec;
void periodicBlink(int led);
void schedule();
void schedule()
{
prec += period; //preparo il tic successivo azzerando il conteggio del tempo ad adesso
step = (step + 1) % nstep; // conteggio circolare (arriva al massimo a nstep-1)
// task 2
if(!(step%3)){ // schedulo eventi al multiplo del periodo (3 sec = 3 periodi)
periodicBlink(led2); // stato alto: led blink
}
// task 1
if(!(step%2)){ // schedulo eventi al multiplo del periodo (2 sec = 2 periodi)
periodicBlink(led1); // stato alto: led blink
}
// il codice eseguito al tempo del metronomo (esattamente un periodo) va quì
}
void periodicBlink(int led) {
digitalWrite(led, !digitalRead(led));
}
void setup() {
//randomSeed(millis());
randomSeed(analogRead(0));
prec=0;
step = 0;
nstep = 100;
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
Serial.begin(115200);
// Select Timer 1-2 for UNO, 0-5 for MEGA
// Timer 2 is 8-bit timer, only for higher frequency
ITimer1.init();
ITimer1.attachInterruptInterval(500, schedule);
// Select Timer 1-2 for UNO, 0-5 for MEGA
// Timer 2 is 8-bit timer, only for higher frequency
ITimer2.init();
ITimer2.attachInterruptInterval(1000, periodicBlink,led3);
}
void loop() {
unsigned randomDelay = random(10, 2000);
Serial.print("delay: ");Serial.println(randomDelay);
delay(500);
periodicBlink(led4);
}
Simulazione su Arduino con Wowki: https://wokwi.com/projects/352009022804591183
Sitografia
- https://techtutorialsx.com/2021/08/07/esp32-ticker-library/
- https://github.com/espressif/arduino-esp32/tree/master/libraries/Ticker
- https://github.com/espressif/esp-idf/tree/8131d6f46d690e9cb60cc5cd457863cc5479351f/components/esp_timer
- https://docs.espressif.com/projects/esp-idf/en/latest/esp32/api-reference/system/esp_timer.html
- https://openlabpro.com/guide/timer-on-esp32/#:~:text=ESP32%20has%20two%20timer%20groups,counters%20and%2016%2Dbit%20prescalers.
- https://docs.espressif.com/projects/esp-idf/en/v4.3/esp32/api-reference/peripherals/timer.html
- https://www.pjrc.com/teensy/td_libs_TimerOne.html
- https://github.com/PaulStoffregen/TimerOne
- https://github.com/PaulStoffregen/TimerThree
- https://github.com/khoih-prog/TimerInterrupt
- https://github.com/khoih-prog/ESP32TimerInterrupt
- https://github.com/marcelloromani/Arduino-SimpleTimer/tree/master/SimpleTimer